



Péndulo doble (CMR)
De Laplace
Contenido |
1 Enunciado
Se tiene un péndulo doble plano. Está formado por una varilla rígida OA de masa despreciable y longitud  articulada en O y en cuyo extremo A se encuentra una masa
articulada en O y en cuyo extremo A se encuentra una masa  . En A se halla articulada una segunda varilla AB, de masa también despreciable, de la misma longitud math>\ell=25\,\mathrm{cm}</math> y en cuyo extremo B se encuentra una segunda masa de valor
. En A se halla articulada una segunda varilla AB, de masa también despreciable, de la misma longitud math>\ell=25\,\mathrm{cm}</math> y en cuyo extremo B se encuentra una segunda masa de valor  .
Tómese
.
Tómese  .
.
- Determine las ecuaciones de movimiento para los ángulos φ, queg forma OA con la vertical, y θ que forma AB con la prolongación de OA. Sugerencia: empléense los cálculos del problema “Dos barras articuladas”
- Suponiendo que las dos varillas realizan oscilaciones muy próximas a la vetical, de manera que
 , calcule las frecuencias de los modos normales de oscilación. ¿Cómo oscilan las varillas en cada uno de los modos normales.
, calcule las frecuencias de los modos normales de oscilación. ¿Cómo oscilan las varillas en cada uno de los modos normales.
- Imaginemos que, estando las varillas en reposo, se sujeta la masa A y la varilla AB se coloca con una inclinación de 5º con respecto a la vertical. Entonces, se sueltan las dos masas. ¿Cómo es el movimiento posterior de cada una de ellas?
2 Ecuaciones de movimiento
2.1 Para la masa A
Siguiendo los cálculos y la notación del problema “Dos barras articuladas” la segunda ley de Newton para la partícula A es

siendo  la tensión de la varilla OA, que va dirigida a lo largo de la propia varilla
la tensión de la varilla OA, que va dirigida a lo largo de la propia varilla
 la tensión de la varilla AB. En el extremo B tira hacia a A y en el extremo A tira hacia B.
la tensión de la varilla AB. En el extremo B tira hacia a A y en el extremo A tira hacia B.
Por su parte, el peso va en la dirección del eje OX positivo

La aceleración de A, tal como se ve en el problema mencionado, es

Todo esto nos da la ecuación

2.2 Para la masa B
La segunda ley de Newton en este caso es

siendo la aceleración de B

lo que nos da la ecuación de movimiento

2.3 Para los ángulos
En las ecuaciones anteriores podemos eliminar las tensiones, que son cantidades desconocidas, proyectando en las direcciones ortogonales. Así, en la ecuación de movimiento para B multiplicamos escalarmente por  y resulta
y resulta

Los productos escalares entre los vectores de las diferentes bases se deducen en el problema de cinemática ya citado.
Para eliminar la tensión de la varilla OA primero sumamos las dos ecuaciones de movimiento. De esta forma se elimina la tensión de la varilla AB, que es una fuerza interna, y queda

Si aquí multiplicamos escalarmente por  resulta
resulta

Podemos escribir estas ecuaciones de una manera menos engorrosa definiendo los parámetros
y resulta el sistema

y

3 Aproximación para ángulos pequeños
3.1 Sistema de ecuaciones
El sistema de ecuaciones general para cualquier valor de los ángulos y las masas no posee solución analítica y es preciso recurrir a métodos numéricos para obtener la solución en casos particulares.
Si los ángulos de desviación respecto a la vertical son pequeños, podemos hacer la llamada aproximación lineal, en la cual se desprecian las potencias de grado superior al primero.
En la misma aproximación

En ese caso, la primera de las dos ecuaciones se aproxima por

y la segunda

En estas ecuaciones podemos despejar las aceleraciones angulares y queda
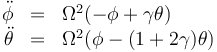
o, en forma matricial,
3.2 Modos normales
Este es un sistema de ecuaciones que se puede resolver mediante la búsqueda de sus modos normales. Se trata de buscar soluciones exponenciales
La solución general es una combinación lineal de todos los modos normales posibles.
Sustituyendo esta solución en el sistema de ecuaciones diferenciales queda la ecuación algebraica

Para que este sistema tenga solución no trivial debe anularse el determinante
Esto nos da la ecuación de cuarto grado
Esta ecuación es, en realidad, una ecuación de segundo frado en ω², con soluciones


