Sistema de dos masas unidas por una varilla (CMR)
De Laplace
Contenido |
1 Enunciado
Un sólido está formado por dos masas iguales,m1 = m2 = m, unidas por una varilla sin masa. En un instante dado, las dos partículas se hallan en  y
y  , respectivamente.
, respectivamente.
- ¿Cuál es la posición del CM del sistema?
- ¿Cuánto vale su tensor de inercia respecto al triedro OX1Y1Z1?
- Determine los ejes principales de inercia y los momentos principales de inercia de este sólido.
- Si la varilla gira con velocidad angular constante
 alrededor del eje OX1, ¿cuánto vale su momento cinético respecto a O? ¿Y su energía cinética?
alrededor del eje OX1, ¿cuánto vale su momento cinético respecto a O? ¿Y su energía cinética?
- Para el movimiento anterior, ¿qué fuerza y que momento hay que aplicar en O para mantener el sistema en movimiento?

2 Centro de masas
Al ser las dos masas iguales, el centro de masas se halla en el punto medio
3 Tensor de inercia
Para un sistema de masas puntuales, basta con sumar las contribuciones de cada una a los diferentes momentos y productos de inercia.
3.1 Respecto al eje OX
La masa 1 se halla sobre el propio eje y la 2 a una distancia 2b, por tanto

3.2 Respecto al eje OY
La masa 1 está a 2b y la 2 a 3b

4 =Respecto al eje OZ
Se trata de una figura plana en el plano OX1Y1 por lo que

4.1 Productos de inercia
Por ser una figura plana en OX1Y1
El único elemento no diagonal no nulo es el xy

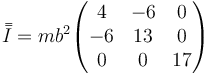
4.2 Forma matricial
Reuniendo los resultados anteriores queda la matriz
También se puede calcular esta matriz directamente en lugar de elemento a elemento, partiendo de la expresión
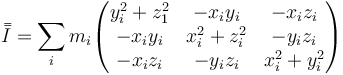
que en este caso nos da

5 Ejes y momentos principales
los momentos principales de inercia resultan de resolver el determinante
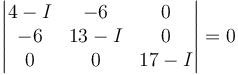
(donde en elr esultado final habrá que multiplicar el número que salga por mb2). Desarrollamos el determinante

Uno de los autovalores es inmediato, IZZ = 17mb2. Esto era de esperar pues ya sabíamos que el eje OZ era principal. Los otros dos salen de una ecuación de segundo grado

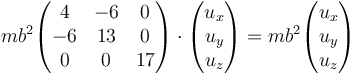
Para hallar cada autovector resolvemos la ecuación vectorial. Para I_{ZZ} es inmediato

que da el sistema

con solución

Para el autovalor IXX operamos de la misma forma
que da el sistema

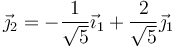
con solución

donde en el última paso se ha normalizado el vector.
Por último, para el autovalor IYY = 16mb2 resulta el tercer vector del triedro
En esta base, el tensor de inercia se escribe