



Sistema de dos masas unidas por una varilla (CMR)
De Laplace
Contenido |
1 Enunciado
Un sólido está formado por dos masas iguales,m1 = m2 = m, unidas por una varilla sin masa. En un instante dado, las dos partículas se hallan en  y
y  , respectivamente, siendo el sistema OX2Y2Z2 uno ligado al sólido (OX1Y1Z1 sería un sistema fijo).
, respectivamente, siendo el sistema OX2Y2Z2 uno ligado al sólido (OX1Y1Z1 sería un sistema fijo).
- ¿Cuál es la posición del CM del sistema?
- ¿Cuánto vale su tensor de inercia respecto al triedro OX2Y2Z2?
- Determine los ejes principales de inercia y los momentos principales de inercia de este sólido.
- Si la varilla gira con velocidad angular constante
 alrededor del eje OX1 = OX2, ¿cuánto vale su momento cinético respecto a O? ¿Y su energía cinética?
alrededor del eje OX1 = OX2, ¿cuánto vale su momento cinético respecto a O? ¿Y su energía cinética?
- Para el movimiento anterior, ¿qué fuerza y que momento hay que aplicar en O para mantener el sistema en movimiento?

2 Centro de masas
Al ser las dos masas iguales, el centro de masas se halla en el punto medio
3 Tensor de inercia
Para un sistema de masas puntuales, basta con sumar las contribuciones de cada una a los diferentes momentos y productos de inercia.
3.1 Respecto al eje OX
La masa 1 se halla sobre el propio eje y la 2 a una distancia 2b, por tanto

3.2 Respecto al eje OY
La masa 1 está a 2b y la 2 a 3b

3.3 Respecto al eje OZ
Se trata de una figura plana en el plano OX1Y1 por lo que

3.4 Productos de inercia
Por ser una figura plana en OX1Y1
El único elemento no diagonal no nulo es el xy

3.5 Forma matricial
Reuniendo los resultados anteriores queda la matriz
También se puede calcular esta matriz directamente en lugar de elemento a elemento, partiendo de la expresión
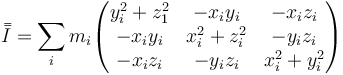
que en este caso nos da

4 Ejes y momentos principales
Los momentos principales de inercia resultan de resolver el determinante
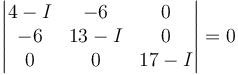
(donde en el resultado final habrá que multiplicar el número que salga por mb2). Desarrollamos el determinante

Uno de los autovalores es inmediato, IZZ = 17mb2. Esto era de esperar pues ya sabíamos que el eje OZ era principal. Los otros dos salen de una ecuación de segundo grado

Para hallar cada autovector resolvemos la ecuación vectorial. Para IZZ es inmediato

que da el sistema

con solución

Para el autovalor IXX operamos de la misma forma
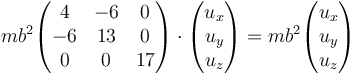
que da el sistema

con solución

donde en el última paso se ha normalizado el vector.
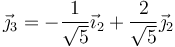
Por último, para el autovalor IYY = 16mb2 resulta el tercer vector del triedro
En esta base, el tensor de inercia se escribe
5 Momento y energía cinética
5.1 Momento cinético
Para el momento cinético no necesitamos los momentos o ejes principales (aunque en problemas de dinámica donde haya que resolver las ecuaciones de Euler si son muy útiles). Nos basta con multiplicar el tensor de inercia por la velocidad angular

o, en forma vectorial,

Por no ser OX2 un eje principal, el momento cinético no es paralelo a la velocidad angular.
Nótese que el momento cinético es constante en el sistema de referencia 2, ligado al sólido, pero no en el 1, fijo. A medida que el sólido gira, el vector momento cinético lo acompaña, describiendo un cono.
5.2 Energía cinética
Conocido el momento cinético, la energía cinética se calcula como
Aquí es importante el hecho de que O es un punto fijo respecto a este movimiento. Si no fuera así la expresión sería más complicada.
6 Fuerza y par
6.1 Fuerza
Por la ley de Newton

aquí mT es la masa total

y  es la aceleración del CM respecto a un sistema fijo.
es la aceleración del CM respecto a un sistema fijo.
El CM está describiendo un movimiento circular uniforme de radio b, por lo que su aceleración es puramente normal, dirigida hacia el eje de rotación (el OX)
y

De manera más formal y general, podemos introducir la velocidad angular relativa entre los dos sólidos (que no será otra que la de rotación)

El centro de masas está estacionario respecto al sistema de referencia 2. Por ello, su aceleración es

El punto O es fijo, por lo que su aceleración es nula. También se anula la aceleración angular, por lo que nos queda

y de aquí llegamos a la fuerza
Nótese que, de nuevo, esta fuerza es constante en el sistema 2, pero en un sistema fijo la dirección de la fuerza va girando.
6.2 Momento de las fuerzas
Por ser O un punto fijo
En este caso, el momento cinético acompaña al sólido en su rotación, de forma que en el sistema 2 es constante

por lo que, según la fórmula de Poisson


