



Manivela y biela alargada, Enero 2018 (G.I.E.R.M.)
De Laplace
Contenido |
1 Enunciado

Una barra homogénea (sólido "0") de longitud  tiene un extremo articulado en el
punto fijo O. En el otro extremo, A, se articula otra barra homogénea de longitud
tiene un extremo articulado en el
punto fijo O. En el otro extremo, A, se articula otra barra homogénea de longitud
 (sólido "2"). El punto medio de esta barra se articula a su vez en un pasador
(punto B), de modo que este punto de la barra se mueve sobre el eje O1X1. La barra "0"
gira alrededor del eje O1Z1 con velocidad angular uniforme Ω.
Todas las magnitudes físicas que se piden
corresponden al instante que se muestra en la figura.
(sólido "2"). El punto medio de esta barra se articula a su vez en un pasador
(punto B), de modo que este punto de la barra se mueve sobre el eje O1X1. La barra "0"
gira alrededor del eje O1Z1 con velocidad angular uniforme Ω.
Todas las magnitudes físicas que se piden
corresponden al instante que se muestra en la figura.
- Localiza gráfica y analíticamente los C.I.R. de los tres movimientos relativos que se pueden definir en el sistema.
- Encuentra reducciones cinemáticas de los tres movimientos relativos. Calcula
 .
.
- Calcula la derivada temporal de la reducción cinemática del movimiento {21} en el punto B.
2 Solución
2.1 Análisis previo
Del enunciado y la figura podemos deducir la siguiente información cinemática
- Todos los movimientos son planos, por lo que todos los vectores de rotación son paralelos al vector
 .
.
- El punto O1 de la barra "0" es un punto fijo siempre:
 y
y  .
.
- Las barras "2" y "0" están articuladas en el punto A en todo instante:
 y
y  .
.
- La velocidad de rotación absoluta de la barra "0" es constante:
 y
y  .
.
- El punto B de la barra "2" se mueve siempre sobre el eje O1X1:
 y
y  .
.
2.2 Localización de los C.I.R.

Del análisis previo deducimos inmediatamente
Para encontrar I21 usamos primero que . Entonces I21 debe estar en la línea perpendicular a  trazada por B. Por otro lado, por el Teorema de los Tres Centros, I21 debe estar también el la línea que une I01 y I20. El corte de las dos líneas
da la posición de I21. Como se observa en la figura tenemos
trazada por B. Por otro lado, por el Teorema de los Tres Centros, I21 debe estar también el la línea que une I01 y I20. El corte de las dos líneas
da la posición de I21. Como se observa en la figura tenemos

Hemos usado que todos los triángulos son rectángulos e isósceles.
2.3 Reducciones cinemáticas
La clave para resolver este apartado es que podemos calcular fácilmente la reducción cinemática {01}
en el punto O1. A partir de ahí, podemos calcular  usando composición de velocidades y usamos el hecho de que conocemos la dirección de .
usando composición de velocidades y usamos el hecho de que conocemos la dirección de .
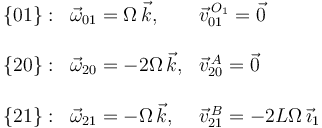
2.3.1 Movimiento {01}
Del análisis previo obtenemos inmediatamente

2.3.2 Movimiento {20}
Del análisis previo obtenemos , pero no sabemos el vector rotación. Sólo
sabemos que podemos escribirlo como
2.3.3 Movimiento {21}
En este punto sólo podemos escribir esto

Usando la composición {21} = {20} + {01} podemos calcular
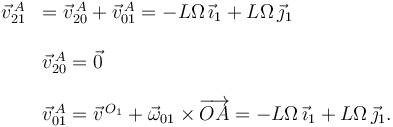
El vector puede calcularse también usando la ecuación del campo de
velocidades del movimiento {21}
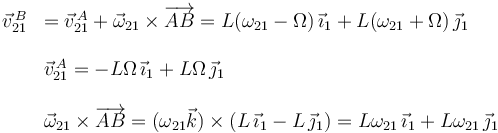
La componente en  tiene que ser nula, por tanto
tiene que ser nula, por tanto
ω21 = − Ω
Y podemos obtener  usando la ley de composiciones de velocidades
angulares
usando la ley de composiciones de velocidades
angulares

Por tanto, las reducciones cinemáticas pedidas son
La velocidad absoluta en C la calculamos como

Hemos usado  .
.
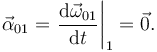
2.4 Derivada de la reducción cinemática {21}
Este apartado se resuelve de manera similar al anterior, pero ahora con las leyes de composición de aceleraciones.
El enunciado nos dice que Ω es constante, por tanto
Del análisis previo tenemos y . Usando el Teorema de Coriolis en A
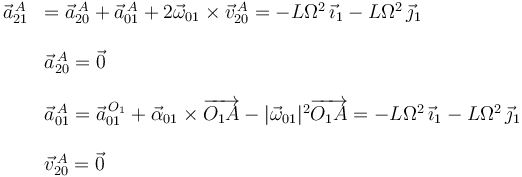
Escribimos la aceleración angular absoluta como
Aplicando la ecuación del campo de aceleraciones del movimiento plano {21} tenemos
Como la componente en debe anularse, tenemos
α21 = 0
Entonces


