



No Boletín - Cuestión sobre EIRMD III (Ex.Ene/16)
De Laplace
Contenido |
1 Enunciado
Un sólido rígido realiza un movimiento helicoidal instantáneo respecto a un triedro de referencia  , estando
definido su campo de velocidades mediante la siguiente reducción cinemática en el origen de coordenadas
, estando
definido su campo de velocidades mediante la siguiente reducción cinemática en el origen de coordenadas  :
:

- Calcule la velocidad de deslizamiento del sólido rígido (segundo invariante).
- ¿Por cuál de los siguientes puntos pasa el eje instantáneo de rotación y mínimo deslizamiento?

2 Velocidad de deslizamiento
La velocidad de deslizamiento  (segundo invariante) es la proyección de la velocidad de cualquier punto sobre la velocidad angular:
(segundo invariante) es la proyección de la velocidad de cualquier punto sobre la velocidad angular:

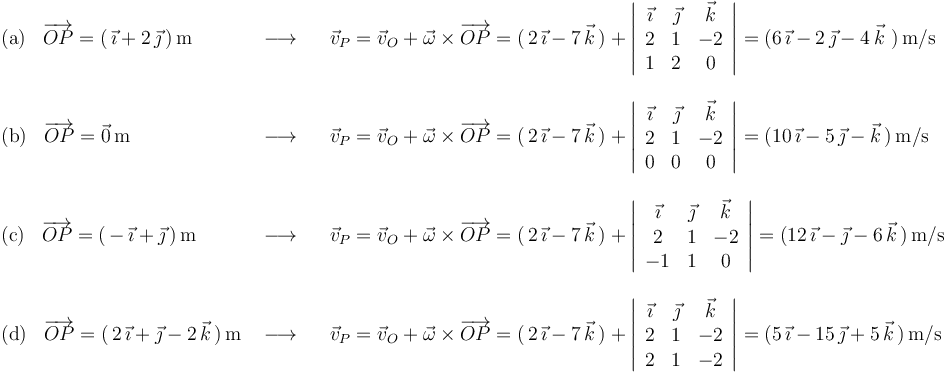
3 Punto perteneciente al EIRMD. Primer método: cálculo de la velocidad del punto 
Utilizando la ecuación del campo de velocidades del sólido rígido, calculamos la velocidad  del punto
del punto  en cada una de las opciones:
en cada una de las opciones:
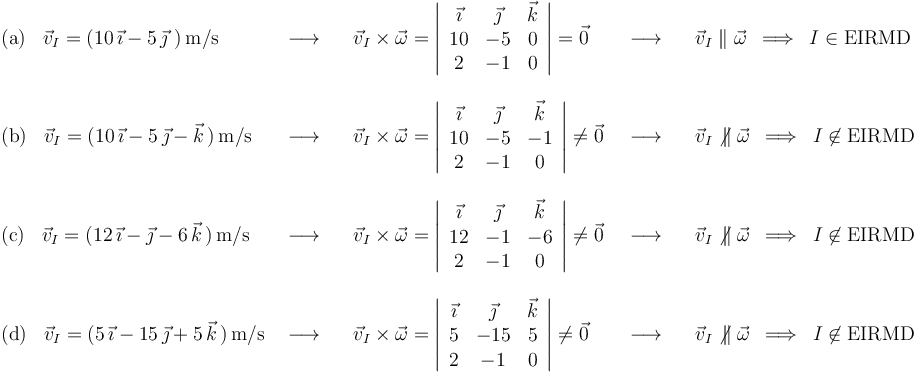
Si el punto  pertenece al eje instantáneo de rotación y mínimo deslizamiento (EIRMD), la velocidad
pertenece al eje instantáneo de rotación y mínimo deslizamiento (EIRMD), la velocidad  de dicho punto es necesariamente paralela al vector velocidad angular
de dicho punto es necesariamente paralela al vector velocidad angular  . Comprobamos que tal cosa sólo ocurre en la opción (a), la cual es por tanto la respuesta correcta:
. Comprobamos que tal cosa sólo ocurre en la opción (a), la cual es por tanto la respuesta correcta:
4 Punto perteneciente al EIRMD. Segundo método: determinación del EIRMD
Partiendo del conocimiento de la reducción cinemática  , es posible determinar el EIRMD del movimiento helicoidal instantáneo. En efecto: aplicando la ecuación vectorial del EIRMD, obtenemos la posición (relativa a
, es posible determinar el EIRMD del movimiento helicoidal instantáneo. En efecto: aplicando la ecuación vectorial del EIRMD, obtenemos la posición (relativa a  ) de un punto genérico del EIRMD:
) de un punto genérico del EIRMD:
![\overrightarrow{AI}=\frac{\vec{\omega}\times\vec{v}_A}{|\,\vec{\omega}\,|^2}\,+\,\lambda\,\vec{\omega}=\frac{1}{5}\left|\begin{array}{ccc} \vec{\imath} & \vec{\jmath} & \vec{k} \\ 2 & -1 & 0 \\ 5 & -15 & 5 \end{array}\right|\,+\,\lambda\,(2\,\vec{\imath}\,-\,\vec{\jmath}\,)=[\,(-1\,+\,2\lambda)\,\vec{\imath}\,-\,(2\,+\,\lambda)\,\vec{\jmath}\,-\,5\,\vec{k}\,]\,\mathrm{m}](/wiki/images/math/3/c/1/3c173065f0457c80dceda3ba4891a65a.png)
Y conocidas las coordenadas del punto  en el triedro OXYZ de referencia, es fácil determinar las coordenadas en dicho triedro de un punto genérico del EIRMD:
en el triedro OXYZ de referencia, es fácil determinar las coordenadas en dicho triedro de un punto genérico del EIRMD:
![\left.\begin{array}{l} \overrightarrow{OA}=(2\,\vec{\imath}+2\,\vec{\jmath}+2\,\vec{k}\,)\,\mathrm{m} \\ \\ \overrightarrow{AI}=[\,(-1+2\lambda)\,\vec{\imath}\,-(2+\lambda)\,\vec{\jmath}\,-5\,\vec{k}\,]\,\mathrm{m} \end{array}\right\}\,\longrightarrow\,\,\,\overrightarrow{OI}=\overrightarrow{OA}\,+\,\overrightarrow{AI}=[\,(1+\,2\lambda)\,\vec{\imath}\,-\,\lambda\,\vec{\jmath}\,-\,3\,\vec{k}\,]\,\mathrm{m}\,\,\,\,\,\longrightarrow\,\,\,\,\, I(1+\,2\lambda,-\lambda,-3)\,\mathrm{m}](/wiki/images/math/f/e/7/fe71973498bb1fe7b619ae87161e4dd7.png)
Comparando esta terna λ-paramétrica de coordenadas con las cuatro ternas propuestas en el enunciado, deducimos de inmediato que la única que corresponde a un punto  es la de la respuesta (a), siendo concretamente
es la de la respuesta (a), siendo concretamente  el punto obtenido para
el punto obtenido para  .
.

