



Aplicaciones de las leyes de Newton (GIE)
De Laplace
Contenido |
1 Caída de los cuerpos
En las proximidades de la superficie terrestre, la ley de Newton de la Gravitación Universal se reduce a

siendo

Una cantidad independiente de la masa del cuerpo.
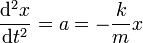
Si suponemos que no hay otra fuerza actuando sobre la partícula, la aplicación de la segunda ley de Newton nos da
esto es que, como ya descubrió Galileo
- En ausencia de rozamiento, todos los cuerpos caen con la misma aceleración.
Esto es, la percepción cotidiana, formulada por Aristóteles, de que los cuerpos pesados caen más rápidamente que los ligeros no se debe a la diferencia en sus pesos, sino a las diferentes fuerzas de rozamiento que actúan sobre ellos.
1.1 Movimiento sin rozamiento
En ausencia de rozamiento, el movimiento de un cuerpo sometido exclusivamente a la acción de sus peso es uno parabólico, ya que la integración de las ecuaciones de movimiento es inmediata. De la aceleración

resulta la velocidad

y de aquí la posición

Separando en componentes quedan las ecuaciones horarias

Vemos que la coordenada vertical sigue un movimiento uniformemente acelerado, mientras que las horizontales varían uniformemente.
1.2 Movimiento con rozamiento
Cuando tenemos en cuenta el rozamiento con el aire el problema se complica bastante. En el caso realista de un objeto que se mueve por el aire, la fuerza de rozamiento sería cuadrática

siendo  la velocidad del aire que rodea a la partícula (el viento). Esto convierte la ecuación de movimiento en una ecuación diferencial
la velocidad del aire que rodea a la partícula (el viento). Esto convierte la ecuación de movimiento en una ecuación diferencial

La aceleración en cada punto depende de la velocidad que tenga, por lo que no se puede simplemente integrar. Además, aparece la velocidad del aire circundante que puede ser variable en el tiempo o dependiente de la posición (hace más viento a alturas mayores). Incluso, para grandes alturas, la densidad ρ que es la del aire, también será dependiente de la posición.
Por ello, no existe una solución analítica general para este tipo de movimiento.
El caso más sencillo de este tipo de movimiento y que sí admite una solución analítica, sería el de la caída de una partícula desde una altura moderada h, partiendo del reposo, y suponiendo que no hay corrientes de aire.
En este caso, el movimiento es puramente vertical, por lo que se pueden considerar variables escalares. De esta forma la ecuación de movimiento se reduce a

Nótese que puesto que la partícula está cayendo, la fuerza de rozamiento va hacia arriba. De ahí el signo positivo que la precede.
A partir de la forma de la ecuación, podemos ver que inicialmente  y por tanto la aceleración es prácticamente la de la gravedad. A medida que se va acelerando aumenta la fricción, hasta que iguala al peso. A partir de ese momento la fuerza es nula y la velocidad permanece constante. Esta velocidad límite cumple
y por tanto la aceleración es prácticamente la de la gravedad. A medida que se va acelerando aumenta la fricción, hasta que iguala al peso. A partir de ese momento la fuerza es nula y la velocidad permanece constante. Esta velocidad límite cumple

Esto nos permite escribir la ecuación de movimiento como
Podemos integrar esta ecuación si en vez de preguntarnos cuánto aumenta la velocidad en un instante, nos preguntamos cuánto tiempo tarda en aumentar una cierta cantidad

Integrando en los dos miembros
Separando en dos fracciones e integrando cada una
y despejando de aquí
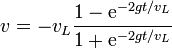
Esta función, como habíamos predicho, comienza con un crecimiento lineal, con pendiente g, para luego estabilizarse en el valor de la velocidad terminal (aunque con signo negativo, indicando que su sentido es hacia abajo).
Integrando de nuevo obtenemos la posición como función del tiempo

y resulta

2 Oscilador armónico
2.1 Ley de Hooke
Todos los materiales sólidos poseen una cierta elasticidad, lo que implica que si se les aplica una pequeña fuerza se comprimen o estiran, según el sentido de la fuerza. Cuando ésta es débil, la deformación es aproximadamente proporcional a la fuerza aplicada. Para el caso de una barra que se estira o comprimer longitudinalmente

Por la tercera ley de Newton, esto quiere decir que la barra ejerce una fuerza igual y de sentido contrario y por tanto proporcional a la deformación

Esta es la conocida como ley de Hooke. Nos dice que cuando se estira o comprime un material elástico, éste ejerce una fuerza proporcional a la deformación efectuada y que se opone a ella (por lo que se denomina fuerza recuperadora).
Se trata de una aproximación válida solo para deformaciones y fuerzas pequeñas. Para deformaciones moderadas, la fuerza recuperadora deja de ser proporcional a la deformación. Para fuerzas grandes la fuerza ya no es capaz de devolver el sólido al estado inicial, con lo que la deformación es permanente (régimen plástico). Mayores deformaciones llegan a producir la ruptura del material.

La constante k que aparece en la ley de Hooke se denomina constante de recuperación o simplemente constante del muelle (por ser los muelles o resortes ejemplos típocs de aplicación de la ley).
Para el caso de una barra o resorte horizontal, podemos emplear cantidades escalares y escribir

siendo Δx la diferencia entre la longitud instantánea, l y la longitud que tiene en ausencia de fuerza, conocida como longitud en reposo, l0, de forma que la ley de Hooke queda

La longitud l puede ser tanto mayor como menor que l0.
2.2 Dinamómetros
La ley de Hooke es la base de los dinamómetros más sencillos. Estos aparatos miden una fuerza simplemente considerando la posición de equilibrio de un resorte elástico.
De acuerdo con la segunda ley de Newton, si sobre una partícula en el extremo de un resorte se aplica una fuerza externa Fext, se cumplirá

Si el resorte está en equilibrio, la aceleración es nula y

con lo cual, midiendo el estiramiento, obtenemos la fuerza.
En el caso de que se trate de un resorte suspendido verticalmente, la fuerza externa es el peso de la masa colgada de él, de forma que la ecuación anterior queda

El estiramiento es proporcional a la masa, lo que constituye el fundamento de la mayoría de las balanzas.
Teniendo en cuenta la posición de equilibrio, la ley de Hooke puede escribirse

que nos dice que la dinámica de un resorte suspendido verticalmente es idéntica a la de uno horizontal, sin más que cambiar la longitud en reposo por la longitud de equilibrio (igual a la de reposo más una cierta cantidad proporcional a la masa colgada).
2.3 Movimiento de un oscilador armónico
2.3.1 Rectilíneo
Si tenemos un resorte gobernado la ley de Hooke, su ecuación de movimiento es

Si medimos la posición no desde el extremo del resorte sino desde la posición de equilibrio

esta ecuación se reduce a
Si hacemos

vemos que la solución de esta ecuación es un movimiento armónico simple, con solución general


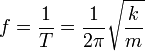
El periodo de las oscilaciones depende de la masa y la constante del muelle
Esto quiere decir que para conseguir el doble de periodo debemos multiplicar por 4 la masa suspendida. La frecuencia natural de las oscilaciones vale
La amplitud y la constante de fase dependen de la posición y la velocidad iniciales.
2.3.2 Tridimensional
La ley de Hooke no solo se aplica a resortes lineales, sino que existen numerosos sistemas que, en las proximidades de un punto de equilibrio, obedecen la ecuación de movimiento

La solución de esta ecuación es la generalización del caso rectilíneo

Sin embargo, a diferencia del caso rectilíneo, esto no se trata de un movimiento armónico simple, aunque lo parezca, sino que la partícula describe una elipse en torno al punto de equilibrio. Esta elipse se encuentra contenida en el plano definido por la posición y la velocidad iniciales.


2.4 Asociaciones de osciladores
¿Qué sucede cuando colgamos un muelle de otro y una masa en el extremo del inferior? ¿Y sí ponemos una masa que cuelga estando sujeta a dos resortes simultáneamente? ¿Cuánto valen en esos casos la frecuencia de oscilación? ¿Cuál es la nueva posición de equilibrio?
2.4.1 Resortes en paralelo

Consideremos en primer lugar el caso de dos resortes de constantes k1 y k2 y longitudes en reposo l10 y l20, que cuelgan del techo y una masa m suspendida de ambos muelles simultáneamente. ¿Cuál es la posición de equilibrio y con qué frecuencia oscila la masa?
Sea l la longitud que adquieren ambos resortes (que será necesariamente la misma para los dos).

La ecuación de movimiento para la masa es

siendo F1 y F2 las fuerzas producidas por cada una de los resortes

La posición de equilibrio nos la da el que la fuerza sea cero

Podemos comprobar que en este resultado si  (el primer muelle se hace infinitamente rígido)
(el primer muelle se hace infinitamente rígido)
esto es, este resorte no de estira en absoluto. Igualmente si hacemos  , es el segundo muelle el que no se estira.
, es el segundo muelle el que no se estira.
Definiendo la posición respecto a la de equilibrio
la ecuación de movimiento se convierte en
que nos dice que el muelle oscila en torno a su posición de equilibrio con una constante equivalente a la asociación que es la suma de las constantes individuales

de forma que la frecuencia de oscilación vale
En particular, si las dos constantes son iguales, esto nos da una constante equivalente que es el doble de cada una de ellas.
Cuando tenemos dos muelles suspendidos en paralelo, la elongación de ambos, respecto a la posición de equilibrio, es necesariamente la misma, mientras que la fuerza es la suma de la que produce cada resorte

De aquí la relación entre las constantes es inmediata

En general, siempre que tengamos dos, tres,... resortes atados a distintos anclajes fijos (que pueden estar en diferentes puntos del espacio) y todos a la misma masa m, la constante equivalente de la asociación es igual a la suma de las constantes individuales.
2.4.2 Resortes en serie

Supongamos ahora dos resortes ideales de constantes k1 y k2 y longitudes en reposo l10 y l20 conectados uno a continuación del otro y una masa que cuelga del extremo inferior de la asociación. En este caso, la masa se encuentra a una distancia del techo

Para escribir las ecuaciones de movimiento, consideraremos temporalmente que en el punto de unión de los dos muelles se encuentra una pequeña masa m0, que luego haremos tender a cero.
La segunda ley de Newton aplicada a la masa m nos da

Nótese que sobre esta masa no actúa el resorte 1, ya que no se encuentra conectado a la masa y no ejerce fuerzas a distancia. Esto nos permite expresar la elongación del muelle inferior en función del peso y la aceleración de la masa

Sobre la masa intermedia actúan los dos resortes, cada uno tirando en un sentido, de forma que

Ahora bien, si la masa intermedia es despreciable,  y la ecuación se reduce a
y la ecuación se reduce a

esto es, los dos resortes ejercen la misma fuerza

Esto nos permite calcular la elongación del muelle superior

Sumando las dos elongaciones obtenemos la elongación total

De aquí sacamos la posición de equilibrio, que se alcanza cuando la aceleración es nula

y definiendo la elongación respecto a la posición de equilibrio
reducimos la ecuación de movimiento a

que nos dice que la asociación se comporta como un solo resorte cuya constante verifica
En particular, si las dos constantes son iguales, esto nos da una constante equivalente que es la mitad de cada una de ellas.
En este caso, lo que tenemos es que la elongación es la suma de las dos elongaciones, mientras que la fuerza es la misma para los dos resortes

de donde resulta de manera inmediata la relación entre constantes

2.5 Oscilaciones no lineales. Péndulo simple
La ley de Hooke es aplicable a muchas situaciones en las que no tenemos un sólido elástico. Supongamos una partícula con un solo grado de libertad se encuentra sometida a una fuerza que depende de la posición F = F(x) (por ejemplo, la gravitatoria o la ley de Coulomb). La partícula se encuentra en una posición de equilibrio, x0 cuando la fuerza sobre ella es nula, F(x0) = 0.
Si consideramos que la partícula se encuentra en una posición próxima a x0 podemos emplear, en vez de la expresión completa de F(x), que puede ser muy complicada, la serie de Taylor en torno a x0

El equilibrio es estable cuando al separar la partícula de la posición de equilibrio, la fuerza recuperadora tiende a devolverlo a ella. En ese caso, la derivada en x0 es negativa y podemos definir

y la fuerza vale aproximadamente

que es de nuevo la ley de Hooke. Esto nos dice que los partículas oscilan aproximadamente de forma armónica cerca de un punto de equilibrio estable.
Si nos alejamos mucho de la posición de equilibrio, ya la aproximación lineal no es suficiente y debemos recurrir a términos de orden superior. En ese caso la fuerza se aproxima por

y ya las oscilaciones no son armónicas.
El ejemplo más sencillo de oscilador no lineal es el del péndulo simple. Consideremos una masa m que pende de un punto fijo a través de una barra rígida ideal, sin masa, y de longitud L. Por acción de la gravedad, la masa oscila en torno al punto más bajo del péndulo.
Si usamos coordenadas polares en las que  es el ángulo con la vertical nos quedan las ecuaciones de movimiento
es el ángulo con la vertical nos quedan las ecuaciones de movimiento

Por estar atada a una barra rígida, la distancia al centro es constante

La fuerza radial es la suma de la tensión de la barra, que va hacia adentro, con la componente radial del peso

mientras que la fuerza acimutal contiene solo la contribución del peso

Esto nos deja con

y

La primera ecuación nos sirve para hallar la tensión una vez que hallamos resuelto la segunda. Esta puede escribirse como
Esta es la ecuación de un oscilador no lineal. Si consideramos que la lenteja del péndulo se separa poco de su posición de equilibrio

y la ecuación del péndulo se reduce a

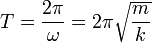
Esta es la ecuación de un oscilador armónico de frecuencia y periodo

Este resultado nos dice que, en primera aproximación, el periodo de un péndulo no depende de la amplitud de las oscilaciones (para grandes amplitudes, esto deja de ser cierto), sino solo de la longitud del péndulo.
Una vez resuelto el problema de hallar  podemos calcular la tensión de la barra de la ecuación radial
podemos calcular la tensión de la barra de la ecuación radial



En el punto más bajo ( ) esta tensión es mayor que la que habría si el péndulo estuviera en reposo, ya que la la fuerza aplicada no es nula, sino que iguala a la masa por la aceleración normal
) esta tensión es mayor que la que habría si el péndulo estuviera en reposo, ya que la la fuerza aplicada no es nula, sino que iguala a la masa por la aceleración normal

3 Tensión de un hilo
Uno de los elementos más comunes en problemas de dinámica es la presencia de hilos flexibles conectados a diferentes cuerpos, anclajes fijos o pasando por poleas. Estos hilos, en primera aproximaciones se consideran como ideales:
- No tienen masa
- Son inextensibles
Al ser inextensibles, garantizan que la distancia entre sus extremos permanece constante.
La propiedad de no tener masa implica que no tienen inercia y que no es necesario aplicarles una fuerza neta para moverlo, sino que simplemente se mueven arrastrados por las masas situadas en sus extremos.
Cuando tiramos de un extremo de un hilo (ideal o real), este experimenta una tensión. Esta es una fuerza debida a la minúscula separación en los átomos del extremo de la cuerda, que a su vez atraen a los átomos situados un poco más allá, y estos tiran de los siguientes, etc. El resultado es que todos los átomos quedan ligeramente separados de sus posiciones de equilibrio y toda el hilo se encuentra en tensión.
En principio, la tensión de un hilo puede ir variando a lo largo de éste. Por ejemplo, imaginemos una cuerda pesada que pende del techo. Los puntos superiores deben soportar una mayor fuerza que los inferiores, y por tanto la tensión será más elevada en los puntos más altos.
Si la cuerda es ideal,sin embargo, la tensión tiene el mismo valor en todos los puntos del hilo. Consideremos un elemento del hilo, de masa dm y longitud dx. De acuerdo con la segunda ley de Newton,

ya que el elemento se encuentra sometido a dos tensiones, una por cada extremo, que tiran en sentidos opuestos. Si el hilo es completamente ideal, la masa de elemento es completamente nula y

Si el hilo se dobla en su camino (por ejemplo, al pasar por una polea también ideal sin masa), la tensión sigue teniendo el mismo módulo en todos los puntos del hilo, aunque su dirección y sentido cambien, por ser siempre tangente al hilo.
3.1 Máquina de Atwood
Una de las aplicaciones de las tensiones de hilos es el de la máquina de Atwood, formada por dos masas m1 y m2 unidas por un hilo ideal que pasa por una polea también ideal. Cuando se liberan estas masas, la más pesada tira de las más ligera y comienzan a moverse aceleradamente. La cuestión es calcular con qué aceleración lo hacen.

Para la masa m1, las fuerzas que actúan sobre ella son su peso y la tensión del hilo, de forma que

Puesto que todas las fuerzas son verticales, podemos usar cantidades escalares

y queda

Haciendo los mismo para la segunda masa

Por ser la cuerda inextensible, la aceleración con la que se estira por un lado debe ser exactamente igual que con la que se recoge por otro.

Por otro lado, como el módulo de la tensión del hilo es el mismo a lo largo de todos sus puntos

lo que nos da la ecuación escalar



y si queremos la tensión del hilo

La fuerza sobre la polea la da en que está sometida a la tensión que tira de ella por sus dos extremos

Vemos que no es simplemente igual al peso de las dos masas, sino que influye el que éstas estén aceleradas. Esta fuerza debe ser contrarrestada por el anclaje de la polea, que debe ejercer una fuerza igual y de sentido contrario  .
.
4 Movimiento sobre una superficie
Un caso de partícula vinculada es aquél en que se ve a obligada a moverse sobre una superficie. Esta superficie puede ser material o simplemente geométrica. Por ejemplo, una partícula que se mueve sobre el interior de un cuenco hemisférico, o una lenteja que oscila en el extremo de un hilo flexible, están sometidos al mismo vínculo de moverse sobre una superficie esférica.
El vínculo de moverse sobre una superficie puede ser unilateral o bilateral. En el caso péndulo con hilo flexible, la ligadura es unilateral, ya que la distancia al centro es menor o igual a L, la longitud del hilo. Si en vez de un hilo tenemos una barra rígida, el vínculo es bilateral, ya que la distancia al centro es siempre igual a L.
Cunado una partícula se mueve sobre una superficie fijada experimenta una fuerza de reacción vincular, que se compone dos partes:
- Una fuerza perpendicular a la superficie, que es la responsable de que la partícula se mueva sobre ella. Por la tercera ley de Newton, esta fuerza será igual y opuesta a la componente normal que la partícula ejerce sobre la superficie.
- Una fuerza de rozamiento, tangente a la superficie. En los casos de contacto seco, sigue las leyes de Coulomb del rozamiento.
En el caso de un vínculo liso (sin rozamiento), la fuerza de reacción es puramente perpendicular a la superficie.
Un ejemplo sencillo lo tenemos en el plano inclinado. Consideremos un bloque de masa m situada sobre un plano inclinado un ángulo β. El coeficiente de rozamiento estático es μ y el dinámico es μd (μd < μ). ¿Cuánto vale el ángulo mínimo para que deslice? Si lo hace, ¿cuánto vale su aceleración?
Las fuerzas que actúan sobre la masa son su peso, la reacción normal del plano y la fuerza de rozamiento. Para que no haya deslizamiento, la suma de las tres debe ser nula. Si usamos un sistema de ejes en el que ele eje OX es tangente al plano y el OY es perpendicular a él, el peso puede escribirse como

mientras que la reacción normal y la fuerza de rozamiento son de la forma

Sumando las tres

Puesto que las dos componentes deben anularse

Dividiendo una por la otra

pero, por las leyes del rozamiento

lo que nos da la condición para el ángulo

Existe un ángulo crítico βc = arctg(β) por debajo del cual el bloque se queda un equilibrio y por encima del cual desliza.

Cuando lo hace, el bloque adquiere una aceleración paralela al plano, con lo que la segunda ley de Newton nos da ahora

Separando en componentes

En el caso del rozamiento dinámico seco

lo que nos da la aceleración, independiente de la masa,

Obsérvese que, puesto que μd < μ existe un rango de ángulos tales que si el bloque está en reposo, permanece en reposo, pero si está en movimiento, continúa haciéndolo aceleradamente. Esto quiere decir en la práctica lo siguiente. Si vamos aumentando la inclinación del plano hasta un poco por debajo la posición de deslizamiento inminente, y ahora le pegamos un golpecito al plano, rompiendo los enlaces causantes del rozamiento estático, el bloque empieza a moverse, ya que la fuerza de rozmainto dinámica no es capaz de contenerlo.

El movimiento sobre una superficie no tiene por qué ser un movimiento plano, y el vector perpendicular a la superficie no tiene por qué coincidir con  , el vector normal a la trayectoria. Por ejemplo, consideremos de nuevo la particula que se mueve en el interior de un cuenco esférico sin rozamiento, sometida a la acción de su peso. La segunda ley de Newton se escribe
, el vector normal a la trayectoria. Por ejemplo, consideremos de nuevo la particula que se mueve en el interior de un cuenco esférico sin rozamiento, sometida a la acción de su peso. La segunda ley de Newton se escribe
donde  va en la dirección radial hacia adentro
va en la dirección radial hacia adentro

lo que nos da las tres ecuaciones escalares

junto con la ecuación del vínculo

En las ecuaciones anteriores Φ no es una constante. Es el módulo de la fuerza de reacción que ejerce el cuenco. Esta fuerza es una función de la posición y del tiempo.
Así, en la figura vemos la solución (obtenida numéricamente) de una partícula en el interior de una esfera a la cual se le ha comunicado una cierta velocidad lateral inicial. Vemos que el peso (flecha verde) es una fuerza constante mientras que la reacción de la superficie (flecha azul) es siempre radial hacia adentro, pero su módulo puede variar considerablemente. La suma de estas dos fuerzas produce una aceleración con una dirección variable, con una componente normal que en ningún caso va en la dirección de la normal a la superficie.


Sustituyendo en las ecuaciones de movimiento queda

De estas ecuaciones obtenemos que

lo que nos dice que este movimiento sólo es posible si z0 < 0, esto es, en el hemisferio inferior. La rapidez que hay que comunicarle a la partícula debe ser, por tratarse de un movimiento circular
y la fuerza de reacción del cuenco tiene por módulo

La dirección de esta fuerza, según hemos dicho, es hacia el centro de la esfera, mientras que el vector normal a la trayectoria apunta en la dirección normal (la única que hay en este caso), y es horizontal.
5 Movimiento a lo largo de una curva
Cuando una partícula se ve obligada a seguir una curva determinada, por ejemplo, un automóvil siguiendo una carretera, o una anilla ensartada en un alambre, experimenta una fuerza de reacción vincular que, como en el caso de la superficie, se compone de:
- una componente perpendicular a la curva, no necesariamente en el sentido de , el unitario en la dirección del vector normal.
- una fuerza de rozamiento en la dirección tangente a la curva.
En el caso de un vínculo liso, sin rozamiento, la fuerza de reacción es puramente perpendicular a la trayectoria.

Un ejemplo sencillo lo tenemos en un coche que describe una curva circular
- En ausencia de rozamiento y de peralte, la fuerza de reacción del suelo es puramente vertical, como lo es el peso, el coche no puede tomar la curva, ya que no hay fuerza horizontal. Necesariamente derrapa.
- Una curva peraltada, posee una inclinación hacia el interior de la curva, lo que proporciona una componente radial a la fuerza de reacción, permitiendo el giro incluso en ausencia de rozamiento. Eso sí, solo a una velocidad concreta.
- El rozamiento lateral debido a los neumáticos es una fuerza radial, responsable, en las curvas llanas no peraltadas, de la fuerza normal hacia el interior de la curva, que permite el giro sin derrapar.
- La combinación de rozamiento y peralte permite un amplio rango de velocidades con las que tomar la curva sin derrapar.


