



Demostración de las leyes de composición de movimientos
De Laplace
Contenido |
1 Introducción
2 Composición de velocidades
Una vez que disponemos de la fórmula de Poisson, podemos aplicarla para relacionar la velocidad de un punto, medida por dos observadores diferentes.
Supongamos un punto P, que se mueve con el sólido móvil 2, tal que su vector de posición respecto al origen O1 de un sistema fijo 1 es

y respecto al origen O de un sólido intermedio 0 es

Estos dos vectores se relacionan por



Derivando aquí respecto al tiempo en el sistema 1 llegamos a la relación

El primero de los dos términos es la velocidad del punto O, medida en el sistema 1.

Para el segundo, relacionamos esta derivada con la medida en el sólido 0

Sumando las dos contribuciones

Si aquí sustituimos el campo de velocidades del sólido 0, la velocidad se reduce a

esto es la velocidad del punto P del sólido móvil, medida por el sólido fijo es la suma de la medida por el sólido intermedio más la que tendría el punto P, si perteneciera al sólido intermedia, medida en el sistema fijo.
En particular, si el sólido 2 es el mismo que el 1, el primer miembro se anula y llegamos a

Hay que destacar que la expresión de la velocidad como suma de velocidades es una relación entre valores instantáneos de las diferentes cantidades, no como funciones del tiempo. Por tanto, no puede derivarse respecto al tiempo para hallar las aceleraciones. La razón es la siguiente: en la expresión aparece la velocidad del punto P del sólido 0, pero el punto P no es siempre el mismo punto material en el sólido 0, sino aquel que en cada instante coincide con el punto P del sólido 2 (que sí es un punto material), esto quiere decir que en el instante t empleamos la velocidad de un punto P, pero en el instante t + dt empleamos la velocidad de otro punto P diferente, y la diferencia de estas dos velocidades no da la aceleración de ninguno de los dos.
La expresión en términos de la velocidad de O y la velocidad angular, en cambio, si puede derivarse respecto al tiempo, ya que el punto O del sólido 0 si está perfectamente definido y se puede seguir su movimiento en el tiempo.
Una consecuencia de la ecuación anterior, y que parece ir contra el sentido común, es la siguiente. Supongamos que tenemos dos observadores A y B, pertenecientes a sólidos 1 y 2, respectivamente. En general, no se cumple que la velocidad de A medida por B sea opuesta a la de B medida por A

En este problema se analiza un ejemplo que muestra distintas variantes de esta desigualdad.
3 Composición de velocidades angulares
Partimos de la ley de composición de velocidades. Tenemos que, en un instante dado, y para cualquier punto P
Restando esta expresión de la correspondiente a otro punto O nos queda la relación entre velocidades relativas

En esta expresión los tres movimientos son rígidos, por lo que verifican

lo que nos da la relación

Puesto que esta relación debe cumplirse para todos los pare de puntos, la única posibilidad es que

A diferencia de la ecuación para las velocidades, esta relación sí puede derivarse respecto al tiempo. La razón es que la velocidad angular es un vector libre que no depende de la posición de ningún punto en concreto, por lo que desaparece el problema de si el punto P en cada instante es el mismo o no.
4 Composición de aceleraciones
Podemos relacionar las aceleraciones medidas por dos observadores a partir de la expresión
Derivando respecto al tiempo en el sistema 1 obtenemos, para cada uno de los términos
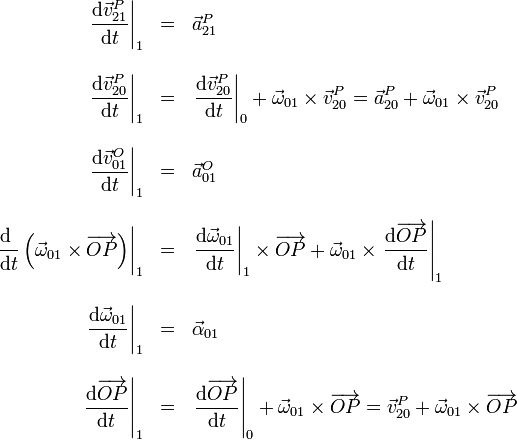
Sustituyendo todo esto obtenemos

Agrupando términos con ayuda de la expresión del campo de velocidades de un sólido obtenemos finalmente

5 Composición de aceleraciones angulares
La ley para la composición de aceleraciones la obtenemos derivando la ley de composición de velocidades angulares
Derivando cada término resulta
- Derivada de la velocidad angular absoluta
- Derivada de la velocidad angular relativa

- Derivada de la velocidad angular de arrastre
Combinando todos estos términos:


