



Demostración de las leyes de composición de movimientos
De Laplace
Contenido |
1 Introducción
Cuando tenemos un “sólido 2” (sólido móvil) que se mueve respecto a un “sólido 0” (sólido intermedio) el cual se mueve a su vez respecto a un “sólido 1” (sólido fijo), existen leyes que relacionan las magnitudes cinemáticas (velocidad lineal y angular, y aceleración lineal y angular) tal como las mide el observador intermedio y como las mide el fijo. Estas son las leyes de composición de movimientos:
- Para la velocidad lineal

- Para la velocidad angular

- Para la aceleración lineal

- Para la aceleración angular

En estas expresiones P es un punto genérico que se mueve con el sólido 2. Cuando se considera como parte del sólido 0 se entiende que se habla del punto de este sólido que ocupa la misma posición instantánea. Puesto que esta coincidencia varía en cada instante, las expresiones anteriores no son derivables respecto al tiempo en general. Simplemente relacionan los valores instantáneos de las magnitudes.
En este artículo se dan las demostraciones de estas expresiones. Para un contexto más general debe consultarse el artículo sobre movimiento relativo de sólidos.
2 Composición de velocidades
Una vez que disponemos de la fórmula de Poisson, podemos aplicarla para relacionar la velocidad de un punto, medida por dos observadores diferentes.
Supongamos un punto P, que se mueve con el sólido móvil 2, tal que su vector de posición respecto al origen O1 de un sistema fijo 1 es

y respecto al origen O de un sólido intermedio 0 es

Estos dos vectores se relacionan por



Derivando aquí respecto al tiempo en el sistema 1 llegamos a la relación

El primero de los dos términos es la velocidad del punto O, medida en el sistema 1.

Para el segundo, relacionamos esta derivada con la medida en el sólido 0

Sumando las dos contribuciones

Si aquí sustituimos el campo de velocidades del sólido 0, la velocidad se reduce a
3 Composición de velocidades angulares
Partimos de la ley de composición de velocidades. Tenemos que, en un instante dado, y para cualquier punto P
Restando esta expresión de la correspondiente a otro punto O nos queda la relación entre velocidades relativas

En esta expresión los tres movimientos son rígidos, por lo que verifican

lo que nos da la relación

Puesto que esta relación debe cumplirse para todos los pare de puntos, la única posibilidad es que
4 Composición de aceleraciones
Podemos relacionar las aceleraciones medidas por dos observadores a partir de la expresión
Derivando respecto al tiempo en el sistema 1 obtenemos, para cada uno de los términos
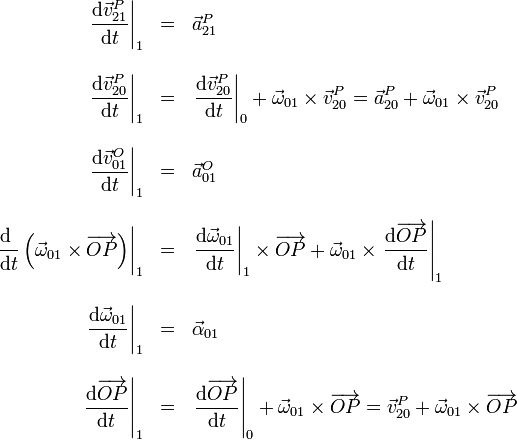
Sustituyendo todo esto obtenemos

Agrupando términos con ayuda de la expresión del campo de aceleraciones de un sólido obtenemos finalmente
5 Composición de aceleraciones angulares
La ley para la composición de aceleraciones la obtenemos derivando la ley de composición de velocidades angulares
Derivando cada término resulta
- Derivada de la velocidad angular absoluta
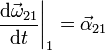
- Derivada de la velocidad angular relativa

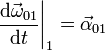
- Derivada de la velocidad angular de arrastre
Combinando todos estos términos:

