



Ejemplo de diferentes estados de movimiento
De Laplace
Contenido |
1 Enunciado
Los vectores de posición y las velocidades de tres puntos de un sólido son, en el SI,
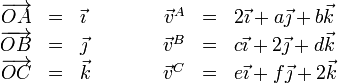
- ¿Qué restricciones impone la condición de rigidez a los valores de las incógnitas a, b, c, d, e y f?
- Halle la velocidad del origen de coordenadas,
 .
.
- Halle los valores de estos parámetros si el sólido se encuentra en un estado de traslación instantáneo.
- Establezca la condición que deben cumplir las constantes si el estado de movimiento es una rotación pura. En este caso, halle el valor de la velocidad angular y la posición del eje instantáneo de rotación.
- En el caso de un estado de movimiento helicoidal, halle la velocidad angular, la velocidad de deslizamiento y la posición del eje instantáneo de rotación y mínimo deslizamiento.
- Para los casos siguientes de los valores de los parámetros
| Caso | a | b | c | d | e | f |
|---|---|---|---|---|---|---|
| I | 2 | 4 | 2 | 4 | 0 | 0 |
| II | 1 | 2 | 3 | 0 | 2 | 4 |
| III | 2 | 2 | 2 | 2 | 2 | 2 |
| IV | 3 | 0 | 1 | -1 | 4 | 4 |
| V | 0 | 1 | 4 | 3 | 3 | 1 |
| VI | 1 | 2 | 3 | 2 | -1 | 1 |
- Indique cuáles corresponden a movimientos rígidos.
- En los casos rígidos, indique si son estados de traslación, rotación o movimiento helicoidal.
- En los casos de rotación, halle la velocidad angular y el EIR.
- En los casos helicoidales, halle la velocidad angular, la de deslizamiento y la posición del EIRMD.
2 Condición de rigidez
La condición cinemática de rigidez implica la equiproyectividad del campo de velocidades:

Aplicando esto a cada uno de los pares de puntos del enunciado tenemos, para los puntos A y B





Repitiendo para A y C




y para B y C




Los parámetros deben cumplir las condiciones
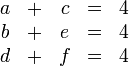
Podemos simplificar la notación haciendo



de manera que las velocidades quedan

Quedan aun tres parámetros por fijar, que dependerán del estado de movimiento del sólido.
3 Velocidad del origen
La velocidad del origen de coordenadas la obtenemos aplicando la equiproyectividad entre los pares formados por este punto y los tres que conocemos. Si

debe cumplirse
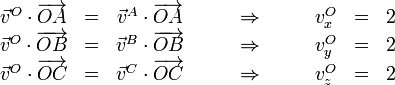
Reuniendo los tres resultados

4 Movimiento de traslación
En un movimiento de traslación, todos los puntos del sólido se mueven a la misma velocidad, lo que en este caso implica

y por tanto

o, en términos de las variables iniciales

5 Movimiento de rotación
5.1 Condición de rotación
Si el sólido experimenta una rotación pura, la velocidad de deslizamiento es nula, y por tanto para los tres puntos A, B y C, debe cumplirse

siendo  no nulo. Si la velocidad angular es perpendicular a la
velocidad de B y de C, esto quiere decir que va en la dirección del producto vectorial de
estos dos vectores, esto es,
no nulo. Si la velocidad angular es perpendicular a la
velocidad de B y de C, esto quiere decir que va en la dirección del producto vectorial de
estos dos vectores, esto es,

Llevando esto a la tercera ecuación tenemos

Puesto que la velocidad angular no es nula, debe cumplirse la condición de que se anule el producto mixto

esto es, los tres vectores deben ser linealmente dependientes (pudiendo ser nulo alguno de ellos).
En este caso, esta condición significa que debe anularse el determinante
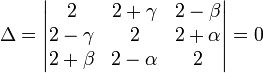
Desarrollando el determinante llegamos a la ecuación
que se reduce a

Esta es la condición que debe cumplirse para que el movimiento sea de rotación. En términos de las variables originales es equivalente a

5.2 Velocidad angular
Podemos hallar la velocidad angular a partir de la relación general

Aplicándolo al par OA tenemos

Igualando estas dos cantidades tenemos


Operando igualmente con cualquiera de los otros pares posibles obtenemos


En términos de las variables originales:

5.3 Eje instantáneo de rotación
Una vez que tenemos la velocidad angular y la velocidad de un punto, podemos hallar la posición del eje instantáneo de rotación usando la fórmula general

Una forma alternativa de llegar a este eje consiste en buscar aquellos puntos que tienen velocidad nula. Aplicando la equiproyectividad al par formado por un punto genérico P y el origen

y al par formado por P y A

Combinando estas ecuaciones obtenemos que el EIR se encuentra en la intersección de los planos


Aunque solo dos de ellas son independientes.
6 Movimiento helicoidal
6.1 Condición de movimiento helicoidal
El movimiento helicoidal se dará cuando no se verifique la condición de rotación pura, esto es, cuando


