



Ejemplo de diferentes estados de movimiento
De Laplace
Revisión a fecha de 10:00 4 ago 2010; Antonio (Discusión | contribuciones)
1 Enunciado
Los vectores de posición y las velocidades de tres puntos de un sólido son, en el SI,
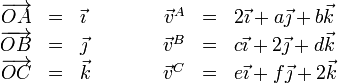
- ¿Qué restricciones impone la condición de rigidez a los valores de las incógnitas a, b, c, d, e y f?
- Halle los valores de estos parámetros si el sólido se encuentra en un estado de traslación instantáneo.
- Establezca la condición que deben cumplir las constantes si el estado de movimiento es una rotación pura.
2 Condición de rigidez
La condición cinemática de rigidez implica la equiproyectividad del campo de velocidades:

Aplicando esto a cada uno de los pares de puntos del enunciado:

