



Varilla en cuchilla (CMR)
De Laplace
| Línea 19: | Línea 19: | ||
* La velocidad de la partícula 1 es paralela al vector de posición relativa | * La velocidad de la partícula 1 es paralela al vector de posición relativa | ||
| - | <center><math>\vec{v}_A\times\overrightarrow{AB}=\vec{0}\qquad\ | + | <center><math>\vec{v}_A\times\overrightarrow{AB}=\vec{0}\qquad\Rightarrow\qquad (x_2-x_1)\dot{y}_1-(y_2-y_1)\dot{x}_1=0</math></center> |
:Este vínculo es cinemático, bilateral, liso y esclerónomo. Es no holónomo porque no puede integrarse para dar un vínculo geométrico. No se puede integrar porque aparecen las derivadas de las coordenadas de la partícula 1 multiplicadas por las coordenadas de la partícula 2, que no dependen de la 1. Por ello no se puede escribir como la derivada de una sola función. | :Este vínculo es cinemático, bilateral, liso y esclerónomo. Es no holónomo porque no puede integrarse para dar un vínculo geométrico. No se puede integrar porque aparecen las derivadas de las coordenadas de la partícula 1 multiplicadas por las coordenadas de la partícula 2, que no dependen de la 1. Por ello no se puede escribir como la derivada de una sola función. | ||
| Línea 63: | Línea 63: | ||
\end{array}</math></center> | \end{array}</math></center> | ||
| - | En términos de las coordenadas sugeridas, derivamos dos veces <math> | + | En términos de las coordenadas sugeridas, derivamos dos veces <math>x_2</math> e <math>y_2</math> |
<center><math>\begin{array}{rcl} | <center><math>\begin{array}{rcl} | ||
| Línea 91: | Línea 91: | ||
<center><math>\begin{array}{rcl} | <center><math>\begin{array}{rcl} | ||
m\ddot{x} & = & mb\left(\dfrac{\dot{\theta}^2C}{2}+\ddot{\theta}S\right)\\ | m\ddot{x} & = & mb\left(\dfrac{\dot{\theta}^2C}{2}+\ddot{\theta}S\right)\\ | ||
| - | m\ddot{y} & = & mb\left( | + | m\ddot{y} & = & mb\left(\dfrac{\dot{\theta}^2S}{2}-\ddot{\theta}C\right) |
\end{array}</math></center> | \end{array}</math></center> | ||
| Línea 131: | Línea 131: | ||
Para U | Para U | ||
| - | <center><math>\dot{U}=\dot{\theta}(-S\dot{x}+C\dot{y})+(C\ddot{x}+S\ddot{ | + | <center><math>\dot{U}=\dot{\theta}(-S\dot{x}+C\dot{y})+(C\ddot{x}+S\ddot{y})=b\frac{\omega^2}{2}</math></center> |
y si derivamos la ecuación del vínculo | y si derivamos la ecuación del vínculo | ||
| Línea 143: | Línea 143: | ||
\dot{Y}& = & -\omega X\\ | \dot{Y}& = & -\omega X\\ | ||
\dot{\theta} & = & \omega \\ | \dot{\theta} & = & \omega \\ | ||
| - | \dot{U}& = & \dfrac{\omega^2}{2} \\ | + | \dot{U}& = & \dfrac{b\omega^2}{2} \\ |
| - | \dot{\omega}& = & -\omega U | + | \dot{\omega}& = & -\dfrac{\omega U}{b} |
\end{array}</math></center> | \end{array}</math></center> | ||
Revisión de 23:18 10 dic 2017
Contenido |
1 Enunciado
Dos masas iguales m están unidas por una varilla rígida ideal de longitud b. La varilla reposa sobre un plano horizontal. una de masas (la “2”) puede deslizar sin rozamiento sobre el plano, pero la “1” está montada sobre una cuchilla que la obliga a desplazarse solo en la dirección paralela a la propia varilla
- ¿Qué vínculos ligan las posiciones y velocidades de las partículas? ¿De qué tipo es cada uno?
- ¿Hacia dónde van dirigidas las fuerzas de reacción vincular?
- Escriba el sistema de ecuaciones de movimiento y de vínculos para este sistema empleando como variables las coordenadas cartesianas de la masa 1 y el ángulo que la varilla forma con el eje OX.
- ¿Pueden reducirse las ecuaciones a un sistema de ecuaciones de primer orden en el que no aparezcan funciones trigonométricas?

2 Vínculos
Si identificamos la posición de cada partícula en el plano por sus coordenadas cartesianas, los vínculos sobre el sistema son tales que:
- La distancia entre las partículas es constante

- Este es un vínculo geométrico (y por tanto holónomo), bilateral, liso y esclerónomo.
- La velocidad de la partícula 1 es paralela al vector de posición relativa

- Este vínculo es cinemático, bilateral, liso y esclerónomo. Es no holónomo porque no puede integrarse para dar un vínculo geométrico. No se puede integrar porque aparecen las derivadas de las coordenadas de la partícula 1 multiplicadas por las coordenadas de la partícula 2, que no dependen de la 1. Por ello no se puede escribir como la derivada de una sola función.
- La forma pfaffiana de este vínculo es

Si usamos como coordenadas las indicadas en el enunciado

(con C y S representando al coseno y el seno de θ), el primer vínculo se vuelve trivial

y el segundo se escribe

3 Fuerzas de reacción
Asociadas a cada vínculo se producen fuerzas de reacción vincular.
- La partícula 1 se ve sometida a una fuerza por cada vínculo. Para el primero, la fuerza va en la dirección de la varilla.

- Para el segundo, es perpendicular a la dirección de movimiento posible y por tanto, perpendicular a la varilla

- Sobre la segunda partícula solo actúa la tensión de la varilla, en sentido opuesto a la que actúa sobre la 1.

4 Ecuaciones de movimiento
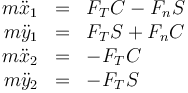
Si separamos por componentes, las ecuaciones de movimiento son
En términos de las coordenadas sugeridas, derivamos dos veces x2 e y2
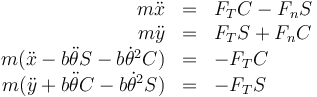
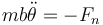
Podemos reducir este sistema restando la tercera de la primera y la segunda de la cuarta para obtener

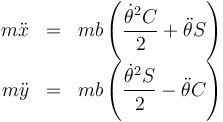
Si ahora multiplicamos la primera por el coseno, la segunda por el seno y sumamos

y si multiplicamos la primera por el seno, la segunda por el coseno y restamos
Esto nos permite eliminar las fuerzas de reacción vincular
Tenemos aqui dos ecuaciones con tres variables. Para completar el sistema hay que añadir la ecuación del vínculo no holónomo
Hay que remarcar que aunque tengamos tres variables, el sistema tiene solo dos grados de libertad.
5 Reducción del sistema
El sistema anterior posee solución analítica, aunque es bastante compleja. Una forma más práctica se abordarlo sería mediante una integración numérica. En ese caso, tropezamos con el problema de las funciones trigonométricas, que son relativamente costosas.
No obstante, puede reescribirse el sistema sin que aparezcan estas funciones como tales.
En primer lugar efectuamos una rotación de ejes, para alinearlos con la varilla, definiendo las nuevas variables

También definimos las velocidades giradas

y la velocidad angular

Con estas variables, el vínculo no holónomo se escribe simplemente

Hallamos las derivada de cada variable. Para X

Para Y

Para U

y si derivamos la ecuación del vínculo

Por tanto, nuestro sistema de ecuaciones equivale a
Al coste de introducir coordenadas adicionales, hemos obtenido un sistema mucho más fácil y rápido de implementar.
Una vez resuelto, las coordenadas de la primera partícula se hallan invirtiendo las relaciones anteriores


