



Varilla en cuchilla (CMR)
De Laplace
Contenido |
1 Enunciado
Dos masas iguales m están unidas por una varilla rígida ideal de longitud b. La varilla reposa sobre un plano horizontal. una de masas (la “B”) puede deslizar sin rozamiento sobre el plano, pero la “A” está montada sobre una cuchilla que la obliga a desplazarse solo en la dirección paralela a la propia varilla
- ¿Qué vínculos ligan las posiciones y velocidades de las partículas? ¿De qué tipo es cada uno?
- ¿Hacia dónde van dirigidas las fuerzas de reacción vincular?
- Escriba el sistema de ecuaciones de movimiento y de vínculos para este sistema empleando como variables las coordenadas cartesianas de la masa A y el ángulo que la varilla forma con el eje OX.
- ¿Pueden reducirse las ecuaciones a un sistema de ecuaciones de primer orden en el que no aparezcan funciones trigonométricas?

2 Vínculos
Si identificamos la posición de cada partícula en el plano por sus coordenadas cartesianas, los vínculos sobre el sistema son tales que:
- La distancia entre las partículas es constante

- Este es un vínculo geométrico (y por tanto holónomo), bilateral, liso y esclerónomo.
- La velocidad de la partícula 1 es paralela al vector de posición relativa

- Este vínculo es cinemático, bilateral, liso y esclerónomo. Es no holónomo porque no puede integrarse para dar un vínculo geométrico. No se puede integrar porque aparecen las derivadas de las coordenadas de la partícula 1 multiplicadas por las coordenadas de la partícula 2, que no dependen de la 1. Por ello no se puede escribir como la derivada de una sola función.
- La forma pfaffiana de este vínculo es

Si usamos como coordenadas las indicadas en el enunciado

(con C y S representando al coseno y el seno de θ), el primer vínculo se vuelve trivial

y el segundo se escribe

3 Fuerzas de reacción
Asociadas a cada vínculo se producen fuerzas de reacción vincular.
- La partícula 1 se ve sometida a una fuerza por cada vínculo. Para el primero, la fuerza va en la dirección de la varilla.

- Para el segundo, es perpendicular a la dirección de movimiento posible y por tanto, perpendicular a la varilla

- Sobre la segunda partícula solo actúa la tensión de la varilla, en sentido opuesto a la que actúa sobre la 1.

4 Ecuaciones de movimiento
Si separamos por componentes, las ecuaciones de movimiento son
En términos de las coordenadas sugeridas, derivamos dos veces x2 e y2
Podemos reducir este sistema restando la tercera de la primera y la segunda de la cuarta para obtener

Si ahora multiplicamos la primera por el coseno, la segunda por el seno y sumamos

y si multiplicamos la primera por el seno, la segunda por el coseno y restamos
Esto nos permite eliminar las fuerzas de reacción vincular
Tenemos aqui dos ecuaciones con tres variables. Para completar el sistema hay que añadir la ecuación del vínculo no holónomo
Hay que remarcar que aunque tengamos tres variables, el sistema tiene solo dos grados de libertad.
5 Ecuaciones de movimiento. Forma alternativa
Estas ecuaciones, o unas equivalentes, pueden obtenerse también empleando dos sistemas de referencia. Definimos un sistema de referencia ligado con origen en A y cuyo eje OX2 va en la dirección de la varilla.
5.1 Posiciones
Empleando los dos sistemas, la posición de A es
y la de B

5.2 Velocidades
La velocidad de A es

Pero esta velocidad solo puede apuntar en la dirección de la varilla, por lo que debe ser de la forma

cumpliéndose las relaciones

La velocidad de B cumple

siendo  la velocidad angular con que gira la varilla. Se cumple
la velocidad angular con que gira la varilla. Se cumple
5.3 Aceleraciones
Derivando la expresión de la velocidad de A obtenemos

ya que
La aceleración de B cumple

Agrupando términos queda

5.4 Ecuaciones de movimiento
La única fuerza que actúa sobre la masa B es la tensión de la varilla, por lo que

Igualando componente a componete

Sobre la masa A actúan la tensión y la fuerza normal a la cuchilla

Igualando componente a componente

Si eliminamos la tensión entre la ecuación para A y la ecuación para B llegamos a

que junto con la ecuación

constituyen las ecuaciones de movimiento del sistema.
6 Sistema de ecuaciones de primer orden
El sistema anterior posee solución analítica, aunque es laboriosa. Una forma más práctica se abordarlo sería mediante una integración numérica. Para ésta, conviene que no aparezcan funciones trigonométricas, que son costosas computacionalmente.
La solución alternativa nos da directamente un sistema de ecuaciones de primer orden, al que también se puede llegar con la primera forma de obtener las ecuaciones de movimiento.
Despejando, tenemos el sistema de ecuaciones
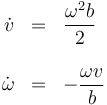
Este sistema nos permite hallar v y ω, dadas las condiciones iniciales.
Una vez que hemos integrado este sistema, la variación del ángulo de la varilla con el tiempo resulta de integrar

y, una vez que hayamos calculado θ hallamos x e y integrando las ecuaciones
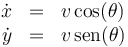
Reuniendo todas las ecuaciones queda el sistema
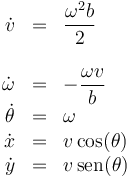
Los valores iniciales de estas variables salen de las posiciones y velocidades iniciales de las dos partículas, de las cuales se pueden despejar estas 5 variables.
Podemos eliminar completamente las funciones trigonométricas, añadiendo una variable más. Si consideramos S y C como variables independientes se cumple

lo que daría el sistema de 6 ecuaciones
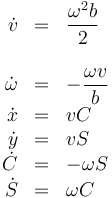
que estaría listo para implementarlo en un programa de ordenador.

