



Construcción de una base (GIOI)
De Laplace
(→Componentes de un vector dado) |
|||
| (Una edición intermedia no se muestra.) | |||
| Línea 112: | Línea 112: | ||
* Para el vector <math>\vec{N}</math> | * Para el vector <math>\vec{N}</math> | ||
| - | <center><math> | + | <center><math>F_n=\vec{F}\cdot\vec{N}=\left(-12\vec{k}\right)\cdot\left(\frac{2}{3}\vec{\imath}+\frac{1}{3}\vec{\jmath}-\frac{2}{3}\vec{k}\right)=-8</math></center> |
* Para el vector <math>\vec{B}</math> | * Para el vector <math>\vec{B}</math> | ||
| - | <center><math> | + | <center><math>F_b=\vec{F}\cdot\vec{B}=\left(-12\vec{k}\right)\cdot\left(-\frac{2}{3}\vec{\imath}+\frac{2}{3}\vec{\jmath}-\frac{1}{3}\vec{k}\right)=+8</math></center> |
Por tanto, el vector <math>\vec{F}</math> se escribe en esta base | Por tanto, el vector <math>\vec{F}</math> se escribe en esta base | ||
| - | <center><math>\vec{F}=-4\vec{T}-8\vec{ | + | <center><math>\vec{F}=-4\vec{T}-8\vec{N}+8\vec{B}</math></center> |
[[Categoría:Problemas de herramientas matemáticas (GIE)]] | [[Categoría:Problemas de herramientas matemáticas (GIE)]] | ||
última version al 15:33 7 oct 2019
Contenido |
1 Enunciado
Dados los vectores

Construya una base ortonormal dextrógira  , tal que
, tal que
- El primer vector,
 , vaya en la dirección y sentido de
, vaya en la dirección y sentido de 
- El segundo,
 , esté contenido en el plano definido por y
, esté contenido en el plano definido por y  y apunte hacia el mismo semiplano (respecto de ) que el vector .
y apunte hacia el mismo semiplano (respecto de ) que el vector .
- El tercero,
 , sea perpendicular a los dos anteriores, y orientado según la regla de la mano derecha.
, sea perpendicular a los dos anteriores, y orientado según la regla de la mano derecha.
- Supongamos un vector que en la base canónica se escribe

- ¿Cuál es su expresión en la base

- ¿Cuál es su expresión en la base
2 Primer vector
Obtenemos el primer vector normalizando el vector , esto es, hallando el unitario en su dirección y sentido, lo que se consigue dividiendo este vector por su módulo

Hallamos el módulo de

por lo que
3 Segundo vector
El segundo vector debe estar en el plano definido por y , por lo que debe ser una combinación lineal de ambos

además debe ser ortogonal a (y por tanto, a )

y debe ser unitario

El procedimiento sistemático consiste en hallar la componente de perpendicular a y posteriormente normalizar el resultado.
La proyección normal la calculamos con ayuda del doble producto vectorial
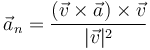
Calculamos el primer producto vectorial
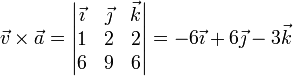
Hallamos el segundo
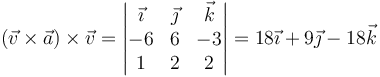
Dividiendo por el módulo de al cuadrado obtenemos la componente normal

Alternativamente, podemos hallar esta proyección ortogonal restando al vector completo la parte paralela

Normalizando esta cantidad obtenemos el segundo vector de la base
4 Tercer vector
El tercer vector lo obtenemos como el producto vectorial de los dos primeros

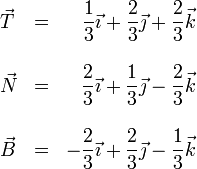
Por tanto, la base ortonormal dextrógira está formada por los vectores
4.1 Forma alternativa
Podemos acortar un poco el proceso invirtiendo el orden de cálculo.
El tercer vector de la base es ortogonal a los dos primeros. También es ortogonal a cualquier combinación lineal de los dos primeros, en particular a los dos vectores del enunciado y . Por ello, podemos calcular el tercer vector como
El producto vectorial vale
con módulo

resultando el unitario
El segundo vector lo obtenemos del producto vectorial del primero y el tercero, teniendo en cuenta el cambio de signo debido a la inversión del orden

5 Componentes de un vector dado
Para hallar las componentes de un vector en esta base debemos proyectar sobre cada uno de los vectores que la componen.
- Para el vector

- Para el vector

- Para el vector

Por tanto, el vector  se escribe en esta base
se escribe en esta base


