



Tabla de cálculo vectorial
De Laplace
(Diferencias entre revisiones)
(→Relación entre bases vectoriales) |
(→En esféricas) |
||
| (5 ediciones intermedias no se muestran.) | |||
| Línea 111: | Línea 111: | ||
===De camino=== | ===De camino=== | ||
====Para coordenadas ortogonales==== | ====Para coordenadas ortogonales==== | ||
| + | :<math>\mathrm{d}\mathbf{r}=h_1\,\mathrm{d}q_1\,\mathbf{u}_{1}+h_2\,\mathrm{d}q_2\,\mathbf{u}_{2}+h_3\,\mathrm{d}q_3\,\mathbf{u}_{3}</math> | ||
| + | |||
====En cartesianas==== | ====En cartesianas==== | ||
| + | :<math>\mathrm{d}\mathbf{r}=\mathrm{d}x\mathbf{u}_{x}+\mathrm{d}y\,\mathbf{u}_{y}+\mathrm{d}z\mathbf{u}_{z}</math> | ||
====En cilíndricas==== | ====En cilíndricas==== | ||
| + | :<math>\mathrm{d}\mathbf{r}=\mathrm{d}\rho\,\mathbf{u}_{\rho}+\rho\,\mathrm{d}\varphi\,\mathbf{u}_{\varphi}+\mathrm{d}z\mathbf{u}_{z}</math> | ||
====En esféricas==== | ====En esféricas==== | ||
| + | :<math>\mathrm{d}\mathbf{r}=\mathrm{d}r\mathbf{u}_{r}+r\,\mathrm{d}\theta\,\mathbf{u}_{\theta}+r\,\operatorname{sen}\,\theta\,\mathrm{d}\varphi\,\mathbf{u}_{\varphi}</math> | ||
| + | |||
===De superficie=== | ===De superficie=== | ||
====Para coordenadas ortogonales==== | ====Para coordenadas ortogonales==== | ||
| + | :<math>\left.\mathrm{d}\mathbf{S}\right|_{q_3=\mathrm{cte}}= h_1 h_2 \mathrm{d}q_1 \mathrm{d}q_2 \mathbf{u}_{3}</math> | ||
====En cartesianas==== | ====En cartesianas==== | ||
| + | :<math>\mathrm{d}\mathbf{S}_x=\mathrm{d}y\,\mathrm{d}z\,\mathbf{u}_{x}</math> | ||
| + | :<math>\mathrm{d}\mathbf{S}_y=\mathrm{d}x\,\mathrm{d}z\,\mathbf{u}_{y}</math> | ||
| + | :<math>\mathrm{d}\mathbf{S}_z=\mathrm{d}x\,\mathrm{d}y\,\mathbf{u}_{z}</math> | ||
| + | |||
====En cilíndricas==== | ====En cilíndricas==== | ||
| + | :<math>\mathrm{d}\mathbf{S}_\rho=\rho\,\mathrm{d}\varphi\,\mathrm{d}z\,\mathbf{u}_{\rho}</math> | ||
| + | :<math>\mathrm{d}\mathbf{S}_\varphi=\mathrm{d}\rho\,\mathrm{d}z\,\mathbf{u}_{\varphi}</math> | ||
| + | :<math>\mathrm{d}\mathbf{S}_z=\rho\,\mathrm{d}\rho\,\mathrm{d}\varphi\,\mathbf{u}_{z}</math> | ||
| + | |||
====En esféricas==== | ====En esféricas==== | ||
| + | :<math>\mathrm{d}\mathbf{S}_r=r^2\,\,\operatorname{sen}\,\theta\,\mathrm{d}\theta\,\mathrm{d}\varphi\,\mathbf{u}_{r}</math> | ||
| + | :<math>\mathrm{d}\mathbf{S}_\theta=r\,\,\operatorname{sen}\,\theta\,\mathrm{d}r\,\mathrm{d}\varphi\,\mathbf{u}_{\theta}</math> | ||
| + | :<math>\mathrm{d}\mathbf{S}_\varphi=r\,\,\mathrm{d}r\,\mathrm{d}\theta\,\mathbf{u}_{\varphi}</math> | ||
| + | |||
===De volumen=== | ===De volumen=== | ||
====Para coordenadas ortogonales==== | ====Para coordenadas ortogonales==== | ||
última version al 11:52 25 jul 2008
Contenido
|
1 Álgebra del operador nabla
1.1 Aplicación sobre productos
1.1.1 De dos campos escalares

1.1.2 De un campo escalar por uno vectorial


1.1.3 De dos campos vectoriales



1.2 Operadores de segundo orden




1.3 Identidades de Green
1.3.1 Primera
1.3.1.1 En forma diferencial

1.3.1.2 En forma integral

1.3.2 Segunda
1.3.2.1 En forma diferencial

1.3.2.2 En forma integral

2 Relación entre los sistemas de coordenadas
2.1 De cartesianas a otros sistemas
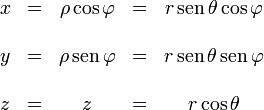
2.2 De cilíndricas a otros sistemas
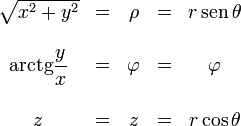
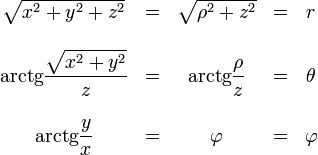
2.3 De esféricas a otros sistemas
3 Vector de posición
3.1 En cartesianas

3.2 En cilíndricas

3.3 En esféricas




























