



Tabla de cálculo vectorial
De Laplace
Contenido
|
1 Álgebra del operador nabla
1.1 Aplicación sobre productos
1.1.1 De dos campos escalares

1.1.2 De un campo escalar por uno vectorial


1.1.3 De dos campos vectoriales



1.2 Operadores de segundo orden




1.3 Identidades de Green
1.3.1 Primera
1.3.1.1 En forma diferencial

1.3.1.2 En forma integral

1.3.2 Segunda
1.3.2.1 En forma diferencial

1.3.2.2 En forma integral

2 Relación entre los sistemas de coordenadas
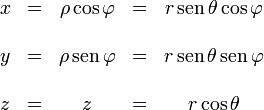
2.1 De cartesianas a otros sistemas
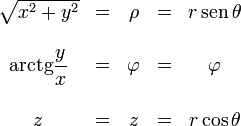
2.2 De cilíndricas a otros sistemas
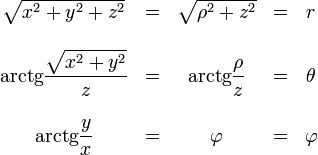
2.3 De esféricas a otros sistemas
3 Vector de posición
3.1 En cartesianas

3.2 En cilíndricas

3.3 En esféricas




























