



Disco y varilla con dos rotaciones
De Laplace
(→Aceleraciones) |
|||
| (2 ediciones intermedias no se muestran.) | |||
| Línea 112: | Línea 112: | ||
<math> | <math> | ||
\begin{array}{lcl} | \begin{array}{lcl} | ||
| - | \vec{ | + | \vec{a}^{\,B}_{01} &=& \vec{a}^{\,O_1}_{01} + \vec{\alpha}_{01}\times\overrightarrow{O_1B} + |
\vec{\omega}_{01}\times(\vec{\omega}_{01}\times\overrightarrow{O_1B})\\ | \vec{\omega}_{01}\times(\vec{\omega}_{01}\times\overrightarrow{O_1B})\\ | ||
&&\\ | &&\\ | ||
| Línea 178: | Línea 178: | ||
</math> | </math> | ||
</center> | </center> | ||
| + | |||
| + | [[Categoría:Problemas de movimiento relativo]] | ||
| + | [[Categoría:Problemas de examen F1 GIA]] | ||
última version al 18:36 7 ene 2015
Contenido |
1 Enunciado

El sistema de la figura está formado por una varilla AB de longitud l (sólido "0"), cuyo extremo A está fijado en el eje vertical O1Z1, a una altura R sobre el plano horizontal fijo O1X1Y1 (sólido "1"). La varilla AB gira alrededor de O1Z1 con una velocidad angular constante Ω, permaneciendo siempre perpendicular a dicho eje vertical fijo. El extremo B del sólido "0" está articulado al centro de un disco de radio R (sólido "2"), de modo que la varilla es siempre perpendicular al disco. El disco gira con una velocidad angular constante ω, coincidiendo su eje de giro con la varilla.
- Caracteriza los movimientos {01}, {20} y {21} (reducciones cinemáticas).
- Obtén la expresión de la velocidad
 del punto de contacto del disco con el plano fijo O1X1Y1, (punto C) en término de los datos del problema. ¿Qué relación debe existir entre las velocidades angulares ω y Ω para que el disco ruede sin deslizar sobre el plano?
del punto de contacto del disco con el plano fijo O1X1Y1, (punto C) en término de los datos del problema. ¿Qué relación debe existir entre las velocidades angulares ω y Ω para que el disco ruede sin deslizar sobre el plano?
- Obtén las expresiones de la aceleración angular del movimiento {21} y de la aceleración
 del centro del disco (punto B). Calcula la aceleración del punto de contacto C perteneciente al disco cuando éste rueda sin deslizar sobre el plano O1X1Y1.
del centro del disco (punto B). Calcula la aceleración del punto de contacto C perteneciente al disco cuando éste rueda sin deslizar sobre el plano O1X1Y1.
2 Solución
2.1 Reducciones cinemáticas
2.1.1 Movimiento {01}
Es una rotación de eje permanente. El eje de rotación es O1Z1. Reduciendo en el punto O1 tenemos

2.1.2 Movimiento {20}
El centro del disco pertenece siempre a los dos sólidos "2" y "0". Por tanto es un punto fijo del movimiento. La velocidad angular es ω, dirigida a lo largo de la varilla. Reduciendo en el punto B tenemos

2.1.3 Movimiento {21}
Expresamos este movimiento como la composición
{21} = {20} + {01}
La velocidad angular es

La velocidad en el punto B es

Para obtener  usamos la ecuación del campo de velocidades del movimiento {01}
usamos la ecuación del campo de velocidades del movimiento {01}

Por tanto la reducción cinemática del movimiento {21} en el punto B es

2.2 Velocidad del punto de contacto
Obtenemos  usando la ecuación del campo de velocidades del movimiento {21} para relacionarla con
usando la ecuación del campo de velocidades del movimiento {21} para relacionarla con 

Para que no deslice debe ocurrir

2.3 Aceleraciones
Obtenemos  usando la composición de movimientos {21} = {20} + {01}
usando la composición de movimientos {21} = {20} + {01}

Veamos cada una de los términos.
El primer término es nulo, pues el punto B pertenece a la vez a los sólidos "2" y "0" en todo instante. Por tanto  en todo instante y
en todo instante y
Por la misma razón el tercer término se anula pues .
Nos queda el segundo término. El movimiento {01} es una rotación de eje permanente. Todos los puntos del eje tienen velocidad nula en todo instante, y Ω es constante, por lo que

Usamos ahora la ecuación del campo de aceleraciones del movimiento {01}
Así pues obtenemos
Para obtener  usamos la ecuación del campo de aceleraciones del movimiento {21}. Necesitaremos
usamos la ecuación del campo de aceleraciones del movimiento {21}. Necesitaremos  . A partir de la composición {21} = {20} + {01} tenemos
. A partir de la composición {21} = {20} + {01} tenemos

Hemos usado que
Podemos ahora hallar
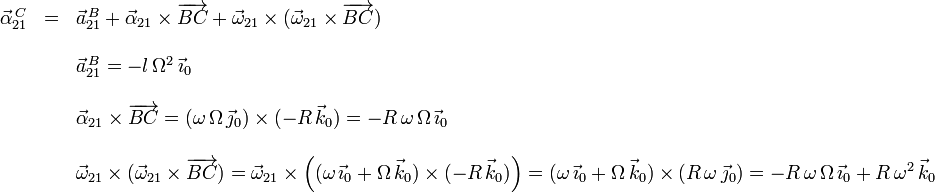
El resultado final es

La condición de no deslizamiento es  . Aplicándola tenemos
. Aplicándola tenemos


