



Movimiento de un sólido conocido un eje
De Laplace
(→Enunciado) |
(→Solución alternativa) |
||
| (3 ediciones intermedias no se muestran.) | |||
| Línea 11: | Línea 11: | ||
Por ser A un punto del eje instantáneo de rotación, EIR | Por ser A un punto del eje instantáneo de rotación, EIR | ||
| - | <center><math>\vec{v} | + | <center><math>\vec{v}_A = \vec{0}</math></center> |
y la velocidad de cualquier otro punto, en particular B, verifica | y la velocidad de cualquier otro punto, en particular B, verifica | ||
| - | <center><math>\vec{v} | + | <center><math>\vec{v}_B = \vec{\omega}\times\overrightarrow{AB}</math></center> |
Esto implica que la velocidad de B es perpendicular a la velocidad angular, lo que nos proporciona una ecuación para la constante | Esto implica que la velocidad de B es perpendicular a la velocidad angular, lo que nos proporciona una ecuación para la constante | ||
| - | <center><math>\vec{\omega}\parallel \vec{e}=2\vec{\imath}-2\vec{\jmath}-\vec{k}</math>{{tose}}<math>0 = \vec{v} | + | <center><math>\vec{\omega}\parallel \vec{e}=2\vec{\imath}-2\vec{\jmath}-\vec{k}</math>{{tose}}<math>0 = \vec{v}_B\cdot\vec{e}=-8+12-c</math>{{tose}}<math>c=4\,</math></center> |
y resulta la velocidad para el punto B | y resulta la velocidad para el punto B | ||
| - | <center><math>\vec{v} | + | <center><math>\vec{v}_B = -4\vec{\imath}-6\vec{\jmath}+4\vec{k}</math></center> |
==Velocidad angular instantánea== | ==Velocidad angular instantánea== | ||
| Línea 32: | Línea 32: | ||
Aplicando ahora la expresión para la velocidad del punto B | Aplicando ahora la expresión para la velocidad del punto B | ||
| - | <center><math>\vec{v} | + | <center><math>\vec{v}_B = \vec{\omega}\times\overrightarrow{AB}</math></center> |
siendo | siendo | ||
| Línea 53: | Línea 53: | ||
Una vez que tenemos la velocidad de un punto conocido y la velocidad angular del sólido, podemos hallar la velocidad de cualquier otro. Así, para el punto P | Una vez que tenemos la velocidad de un punto conocido y la velocidad angular del sólido, podemos hallar la velocidad de cualquier otro. Así, para el punto P | ||
| - | <center><math>\overrightarrow{AP}=\vec{\jmath}+\vec{k}</math> {{tose}}<math>\vec{v} | + | <center><math>\overrightarrow{AP}=\vec{\jmath}+\vec{k}</math> {{tose}}<math>\vec{v}_P = \overbrace{\vec{v}_A}^{=\vec{0}} + \vec{\omega}\times\overrightarrow{AP} = \left|\begin{matrix}\vec{\imath} & \vec{\jmath} & \vec{k} \\ 4 & -4 & -2\\ 0 & 1 & 1\end{matrix}\right|=-2\vec{\imath}-4\vec{\jmath}+4\vec{k}</math></center> |
| + | ==Solución alternativa== | ||
| + | Los dos primeros apartados se pueden hacer de una sola vez, por aplicación del teorema de Chasles | ||
| + | |||
| + | <center><math>\vec{v}_B = \overbrace{\vec{v}_A}^{=\vec{0}}+\vec{\omega}\times\overrightarrow{AB}</math></center> | ||
| + | |||
| + | con | ||
| + | |||
| + | <center><math>\overrightarrow{AB}=\overrightarrow{OB}-\overrightarrow{OA}=-\vec{\imath}+2\vec{\jmath}+2\vec{k}</math></center> | ||
| + | |||
| + | Puesto que sabemos que la velocidad angular es paralela al vector <math>\vec{e}</math> | ||
| + | |||
| + | <center><math>\vec{\omega} = \omega\frac{\vec{e}}{|\vec{e}\,|}=\omega\left(\frac{2}{3}\vec{\imath}-\frac{2}{3}\vec{\jmath}-\frac{1}{3}\vec{k}\right)</math></center> | ||
| + | |||
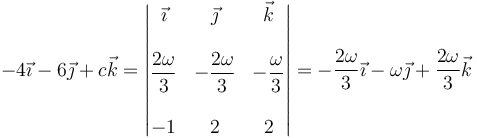
| + | El teorema de Chasles se expresa en este caso | ||
| + | |||
| + | <center><math>-4\vec{\imath}-6\vec{\jmath}+c\vec{k} = \left|\begin{matrix} \vec{\imath} & \vec{\jmath} & \vec{k} \\ && \\ \dfrac{2\omega}{3} & -\dfrac{2\omega}{3} & -\dfrac{\omega}{3} \\ && \\ -1 & 2 & 2 \end{matrix}\right| = -\frac{2\omega}{3}\vec{\imath} -\omega\vec{\jmath} +\frac{2\omega}{3}\vec{k}</math></center> | ||
| + | |||
| + | Igualando componente a componente | ||
| + | |||
| + | <center><math>-4 = -\frac{2\omega}{3}\qquad\qquad -6 = -\omega \qquad\qquad c = \frac{2\omega}{3}</math></center> | ||
| + | |||
| + | Las dos primeras son redundantes y dan | ||
| + | |||
| + | <center><math>\omega = 6\,</math></center> | ||
| + | |||
| + | y sustituyendo en la tercera | ||
| + | |||
| + | <center><math>c = 4\,</math></center> | ||
[[Categoría:Problemas de cinemática del sólido rígido (GIE)]] | [[Categoría:Problemas de cinemática del sólido rígido (GIE)]] | ||
| + | [[Categoría:Problemas de cinemática del sólido rígido]] | ||
última version al 09:47 24 sep 2015
Contenido |
1 Enunciado
Un sólido rígido se encuentra en rotación instantánea alrededor de un eje que pasa por el punto A(1,0, − 1) y lleva la dirección del vector  , de tal forma que la velocidad del punto B(0,2,1) es
, de tal forma que la velocidad del punto B(0,2,1) es 
- Halle el valor de la constante c.
- Calcule la velocidad angular instantánea.
- Calcule la velocidad del punto P(1,1,0).
Todas las cantidades están expresadas en las unidades del SI.
2 Valor de la constante
Por ser A un punto del eje instantáneo de rotación, EIR

y la velocidad de cualquier otro punto, en particular B, verifica
Esto implica que la velocidad de B es perpendicular a la velocidad angular, lo que nos proporciona una ecuación para la constante




y resulta la velocidad para el punto B

3 Velocidad angular instantánea
Para hallar la velocidad angular, primero la escribimos como el producto de una componente escalar por el unitario en su dirección

Aplicando ahora la expresión para la velocidad del punto B
siendo

lo que nos da

Igualando componente a componente



Las tres ecuaciones conducen a la misma solución


4 Velocidad del punto P
Una vez que tenemos la velocidad de un punto conocido y la velocidad angular del sólido, podemos hallar la velocidad de cualquier otro. Así, para el punto P

5 Solución alternativa
Los dos primeros apartados se pueden hacer de una sola vez, por aplicación del teorema de Chasles
con
Puesto que sabemos que la velocidad angular es paralela al vector 
El teorema de Chasles se expresa en este caso
Igualando componente a componente

Las dos primeras son redundantes y dan
y sustituyendo en la tercera

