



6.3. Barra apoyada en placa
De Laplace
(→Velocidades) |
(→Conociendo la posición del CIR {20}) |
||
| Línea 44: | Línea 44: | ||
<center><math>\vec{v}^A_{01} = \omega_{02}\vec{k}\times\overrightarrow{I_{02}A}+\omega_{21}\vec{k}\times\overrightarrow{I_{21}A}</math></center> | <center><math>\vec{v}^A_{01} = \omega_{02}\vec{k}\times\overrightarrow{I_{02}A}+\omega_{21}\vec{k}\times\overrightarrow{I_{21}A}</math></center> | ||
| - | La velocidad angular <math>\omega_{21}</math> la da la derivada temporal del ángulo | + | La velocidad angular <math>\omega_{21}</math> la da la derivada temporal del ángulo que forma el <math>OX_1</math> con el <math>OX_2</math>, que suponemos ligado a la propia barra: |
<center><math>\omega_{21}=\dot{\theta}</math></center> | <center><math>\omega_{21}=\dot{\theta}</math></center> | ||
Revisión de 16:15 21 dic 2010
Contenido |
1 Enunciado
El esquema de la figura muestra una placa cuadrada de lado a (sólido ``0"), uno de cuyos lados desliza sobre el eje horizontal fijo OX1 (sólido “1”), mientras que la placa permanece contenida siempre en el plano vertical fijo OX1Y1. Sobre el vértice A de dicha placa se apoya en todo instante una varilla delgada (sólido “2”), que gira con velocidad angular constante  , alrededor de su extremo articulado en el punto fijo O (ver figura). Se pide:
, alrededor de su extremo articulado en el punto fijo O (ver figura). Se pide:
- Determinar gráficamente la posición de los centros instantáneos de rotación I21, I02 e I01.
- Calcular: i) La velocidad del vértice A de la placa en el movimiento de ésta respecto de los ejes fijos (movimiento {01}), expresada en función de la posición del sistema:
 . ii) La velocidad angular
. ii) La velocidad angular  , correspondiente al movimiento relativo de la placa respecto de la varilla (movimiento {02}).
, correspondiente al movimiento relativo de la placa respecto de la varilla (movimiento {02}).
- Determinar analíticamente la posición del CIR del movimiento {02} (en función del ángulo θ).

2 Centros instantáneos de rotación

- Del movimiento {01}
- La placa realiza un movimiento de traslación horizontal, por lo que el centro instantáneo de rotación del movimiento {20} será un punto del infinito situado según la dirección vertical.
- Del movimiento {21}
- La barra efectúa un movimiento de rotación en torno al punto en el cual se encuentra articulada. Este punto será el CIR I21, que de hecho en este caso se trata de un centro permanente y no solo instantáneo.
- Del movimiento {20}
- Por el teorema de los tres centros, el CIR I20 estará alineado con los otros dos. Puesto que I01 está en el infinito según la dirección vertical, el CIR I20 debe encontrarse en la vertical del punto O = I21, esto es, se trata de un punto del eje OY1.
- Queda por determinar la posición sobre este eje. Para ello necesitamos la dirección de la velocidad de algún punto en el movimiento {20} o el {02}. El más simple es el punto A, donde contactan la barra y la placa. Este contacto impone un vínculo sobre las posibles velocidades de A. En particular, impide que A, en el movimiento {02}, tenga una componente perpendicular a la propia barra, ya que de ser así atravesaría ésta.
- Por tanto,
 es tangente a la propia barra. Ello implica que I20 se encuentra en la intersección de la perpendicular a la barra por A con el eje OY1.
es tangente a la propia barra. Ello implica que I20 se encuentra en la intersección de la perpendicular a la barra por A con el eje OY1.
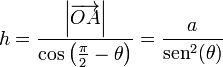
- Podemos obtener las coordenadas de este punto empleando trigonometría. Si la altura de la placa es a, la distancia OA es la hipotenusa de un triángulo rectángulo, por lo que

- La altura h es la hipotenusa de otro triángulo rectángulo, uno de cuyos catetos es OA. Por ello
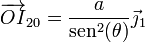
- En forma vectorial
3 Velocidades
3.1 Conociendo la posición del CIR {20}
Para hallar la velocidad de traslación de A (que es la misma de cualquier otro punto de la placa), podemos usar la ley de composición de velocidades

Cada una de estas velocidades es una rotación alrededor de su correspondiente CIR

La velocidad angular ω21 la da la derivada temporal del ángulo que forma el OX1 con el OX2, que suponemos ligado a la propia barra:

La del movimiento {02} la obtenemos por composición de velocidades angulares, teniendo en cuenta que el movimiento {01} es una traslación

Resulta una velocidad angular igual y opuesta a la primera. De aquí llegamos a la velocidad de traslación

El vector de posición relativo entre los dos centros instantáneos de rotación es

y llegamos a la velocidad de traslación

3.2 Desconociendo la posición del CIR {20}
Alternativamente, supongamos que en el primer apartado no hemos sido capaces de localizar el centro instantáneo de rotación I20. ¿Cómo podemos hallar en ese caso la velocidad de traslación?
Recurrimos de nuevo a la fórmula de composición de velocidades

