



Triedro intínseco de una hipérbola, Noviembre 2011 (G.I.C.)
De Laplace
Contenido |
1 Enunciado

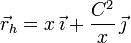
Se tiene la hipérbola de la figura, que viene dada por la ecuación y = C2 / x, siendo C una constante.
- ¿Cuál de las siguientes expresiones corresponde al vector tangente en cada punto?
 .
.
 .
.
 .
.
 .
.
- ¿Cuál de las siguientes expresiones corresponde al vector normal en cada punto?
 .
.
 .
.
 .
.
 .
.
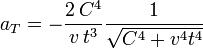
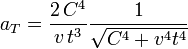
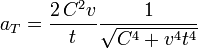
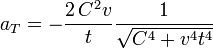
- Un punto recorre la hipérbola de modo que la coordenada sobre el eje X depende del tiempo como
 (suponemos t > 0). La aceleración tangencial en un instante de tiempo t es
(suponemos t > 0). La aceleración tangencial en un instante de tiempo t es
 .
.
 .
.
 .
.
 .
.
2 Solución
2.1 Vector tangente
El vector de posición de un punto genérico en el plano es
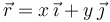
Si imponemos que ese punto esté sobre la hipérbola las componentes x e y están relacionadas por la ecuación de la hipérbola. El vector de posición de un punto situado en la curva es
El vector tangente es
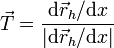
La derivada del vector de posición es
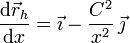
El módulo de este vector es

Por tanto el vector tangente es

Otra forma de ver que esta es la opción correcta es darse cuenta de que el vector tangente tiene que tener una componente positiva y otra negativa. Eso elimina dos opciones. Para elegir la buena razonamos que cuando  , el vector
, el vector  debe ser paralelo a
debe ser paralelo a  . Igualmente, cuando tiende a
. Igualmente, cuando tiende a  debe ser paralelo a
debe ser paralelo a 
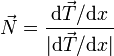
2.2 Vector normal
La manera más sencilla de elegir la opción correcta es darse cuenta de que el vector normal debe tener las dos componentes positivas, pues apunta siempre hacia la parte cóncava de la curva. Y de las dos opciones que quedan, elegimos la que es perpendicular al vector del apartado anterior. O razonando igual que antes, cuando , el vector normal debe ser paralelo a , y al ocurrir , el vector normal debe ser paralelo a . Por tanto la respuesta correcta es
La forma larga de hacer el apartado es aplicar la definición del vector normal
2.3 Aceleración tangencial
Sustituimos la función que nos da x(t) en el vector de posición.
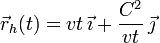
Derivamos respecto al tiempo para obtener la velocidad y la aceleración
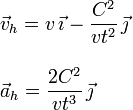
La aceleración tangencial es la proyección de la aceleración sobre el vector tangente. Usamos la expresión de del primer apartado, sustituyendo x por vt. Obtenemos


