



Sistema de vectores deslizantes equivalente a un sistema de vectores deslizantes
De Laplace
Contenido |
1 Enunciado
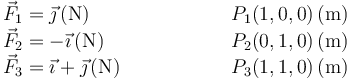
Se tiene un s.v.d. formado por tres vectores  ,
,  y
y  , con puntos de aplicación P1, P2 y P3.
, con puntos de aplicación P1, P2 y P3.
- Encuentra la resultante y el momento resultante en el origen.
- ¿Existe un s.v.d. formado por un vector suelto que sea dinámicamente equivalente al sistema original?
2 Solución
2.1 Resultante y momento resultante en O
La resultante de este sistema es

El momento de cada vector respecto al punto O
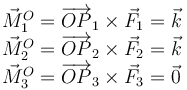
El momento resultante es la suma de los tres

2.2 ¿Vector suelto equivalente?
Los sistemas de vectores deslizantes pueden caracterizarse en función de la nulidad o no de sus invariantes escalares. En este sistema son

El invariante escalar es cero. Esto significa que existe un punto del espacio
en el que la reducción consta de un sólo vector deslizante con cursor igual a  . Pero
si existe un punto, la recta definida por ese punto y el vector cumple
la misma propiedad, pues un vector deslizante puede moverse libremente por su recta soporte.
. Pero
si existe un punto, la recta definida por ese punto y el vector cumple
la misma propiedad, pues un vector deslizante puede moverse libremente por su recta soporte.
Para encontrar la recta donde ocurre esto usamos la ecuación del campo momentos. Buscamos un punto P en el que el momento resultante del sistema sea nulo

Multiplicamos los dos lados de la expresión vectorialmente por

El objetivo es despejar  . Pero ello no es posible en esta
expresión. Pero P puede ser cualquier punto de la recta soporte del vector
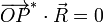
buscado. Podemos entonces buscar el punto de la recta soporte tal que se verifique
. Pero ello no es posible en esta
expresión. Pero P puede ser cualquier punto de la recta soporte del vector
buscado. Podemos entonces buscar el punto de la recta soporte tal que se verifique
 . Ahora podemos despejar
. Ahora podemos despejar
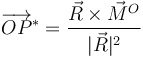
Este vector localiza un punto de la recta soporte del vector suelto equivalente al s.v.d. original. En nuestro caso tenemos

El vector deslizante definido por

es dinámicamente equivalente al sistema original.

