



Partícula moviéndose sobre una hélice, Enero 2015 (F1 GIA)
De Laplace
Contenido |
1 Enunciado

Una partícula P de masa m está insertada en la hélice fija y uniforme Γ. Utilizando un sistema de referencia cartesiano OXYZ, en el cuál la gravedad está descrita analíticamente por el vector  , la ecuación parámetrica de dicha hélice es:
, la ecuación parámetrica de dicha hélice es:
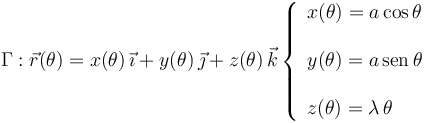
donde a y λ son constantes. EL parámetro geométrico θ es el ángulo que forma con el eje OX la proyección del radio-vector  sobre el plano horizontal OXY. Cuando la partícula recorre la hélice Γ, sin rozamiento apreciable, su movimiento queda descrito por la ley horaria θ(t).
sobre el plano horizontal OXY. Cuando la partícula recorre la hélice Γ, sin rozamiento apreciable, su movimiento queda descrito por la ley horaria θ(t).
- Determine cuál debe ser el valor de la constante λ para que el radio de curvatura de la hélice sea Rκ = 3a / 2. ¿Qué distancia h asciende la partícula en la dirección vertical cada vez que da una vuelta completa alrededor del eje OZ.
- Obtenga la expresiones de las componentes intrínsecas de la velocidad y la aceleración en términos de la ley horaria θ(t) y/o sus derivadas.
- Discuta razonadamente si se verificará la conservación (total o parcial) del momento cinético
 de la partícula, calculado respecto del punto fijo O.
de la partícula, calculado respecto del punto fijo O.
2 Solución
Hay diferentes maneras de resolver este problema. Vamos a describir una de ellas y al final discutiremos otras posibilidades.
2.1 Valor del parámetro λ
Tenemos la descripción paramétrica de la curva. Podemos calcular la curvatura, y de ahí el radio de curvatura, basándonos en esta descripción. La curvatura es

donde  es el vector tangente a la curva y s es el parámetro arco. Como no tenemos la curva parametrizada en función del parámetro arco, sino de θ usamos la regla de cadena para obtener la curvatura:
es el vector tangente a la curva y s es el parámetro arco. Como no tenemos la curva parametrizada en función del parámetro arco, sino de θ usamos la regla de cadena para obtener la curvatura:
Obtenemos el vector tangente derivando el vector de posición respecto de θ

El módulo es

El vector tangente es

Su derivada es

y su módulo
Necesitamos la derivada del parámetro arco respecto al parámetro θ. Teniendo en cuenta que  tenemos
tenemos

Dividiendo por ds en ambos lados obtenemos
Con lo cual la curvatura queda
y el radio de curvatura es
Observemos que la dimensiones del resultado son coherentes, pues a y λ tienen dimensiones de longitud. Para cumplir la condición del enunciado imponemos

Resolviendo para λ obtenemos
2.2 Componentes intrínsecas
El ángulo θ varía con el tiempo según una ley horaria desconocida θ(t). Podemos expresar la velocidad y la aceleración de la partícula en función de θ y sus derivadas respecto del tiempo. Tenemos para la velocidad

Para la aceleración hay que tener en cuenta que tanto θ como  son funciones del tiempo. Tenemos
son funciones del tiempo. Tenemos

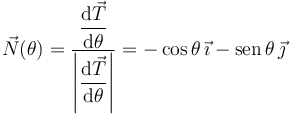
Para calcular las componentes intrínsecas lo más sencillo es calcular el vector normal a partir del vector tangente y hacer los productos escalares correspondientes
La componente intrínseca de la velocidad es

la aceleración tangencial es

y la aceleración normal es

2.3 Momento cinético
El momento cinético respecto del punto O es

Como tenemos los dos vectores podemos calcular el momento cinético en cada instante

Como vemos, ninguna de las tres componentes es constante. Las componentes en X y Y dependen de θ y , y la componente Z depende de . Tanto θ como dependen en general del tiempo, así que no son constantes. El momento cinético no se conserva ni total ni por componentes.
Para que el momento cinético sea constante el momento de la fuerza neta respecto a O debe ser cero. Actúan sobre la partícula dos fuerzas, el peso y la fuerza de reacción vincular, que hace que no se salga de la hélice. La fuerza neta en cada instante es

Al hacer el momento
se obtiene que todas las componentes dependen en general del tiempo. La fuerza neta no es nula ni central respecto al punto O. Tampoco hay ninguna componente nula que pudiera implicar la conservación de alguna componente del momento cinético.
2.4 Resoluciones alternativas
2.4.1 Componentes intrínsecas
Podemos calcular las componentes intrínsecas usando las expresiones cinemáticas, es decir, derivando sólo respecto al tiempo. Derivando el vector de posición obtenemos la velocidad y la aceleración de la partícula

El vector tangente es

Al calcular así el vector tangente, la componente intrínseca de la velocidad es su módulo

La aceleración tangencial es
O también se puede calcular derivando la rapidez
Podemos calcular la aceleración normal de dos maneras

Una vez llegados aquí podemos calcular el radio de curvatura como
e imponer la condición para calcular λ.
2.4.2 Condición sobre el radio de curvatura
Esta técnica sólo es válida para el primer apartado. No conocemos θ(t), pero podemos usar el hecho de que las características geométricas de la curva, entre ellas su radio de curvatura, no dependen de como se recorra. Podemos elegir una θ(t) arbitraria y calcular la velocidad y la aceleración con esa dependencia. Por ejemplo, si escogemos θ(t) = ωt obtenemos para la velocidad y la aceleración

Y ahora calculamos el radio de curvatura como
Repetimos, esta técnica sólo es válida para el primer apartado. Para calcular las componentes intrínsecas no se puede fijar una forma de la ley horaria θ(t). Hay que calcularlas en función de θ, y  .
.
2.5 Errores comunes
Estos son algunos de los errores mas habituales encontrados al corregir el problema.
2.5.1 Inconsistencias dimensionales
De la expresión paramétrica  vemos que las constantes a y λ tienen dimensiones de longitud. En mucho exámenes se obtenían expresiones dimensionalmente incoherentes para el radio de curvatura, que también tiene dimensiones de longitud, o para λ. Algunos ejemplos son
vemos que las constantes a y λ tienen dimensiones de longitud. En mucho exámenes se obtenían expresiones dimensionalmente incoherentes para el radio de curvatura, que también tiene dimensiones de longitud, o para λ. Algunos ejemplos son
Todas estas expresiones son absurdas, pues las dimensiones están mal.
2.5.2 Suponer una ley para θ(t)
Hemos visto que el primer apartado se puede resolver escogiendo arbitrariamente una ley horaria θ(t). Pero haciendo esto no se obtiene un resultado correcto para las componentes intrínsecas. Éstas hay que dejarlas en función de θ(t) y sus derivadas primera y segunda respecto al tiempo.
2.5.3 Derivar mal respecto del tiempo para calcular la aceleración
En varios casos se ha aplicado mal el proceso de derivar respecto del tiempo, especialmente al calcular la aceleración.
2.5.4 Aplicación incorrecta de la regla de la cadena
Podemos aplicar la regla de la cadena para calcular la velocidad y la aceleración, pero hay que hacerlo bien. Para la velocidad tenemos
Para la aceleración hay que tener en cuenta que tanto θ como dependen del tiempo. Para aplicar la regla de la cadena bien hay que hacer
2.5.5 Ignorar la fuerza de reacción vincular
El enunciado dice que la partícula recorre el vínculo (la hélice) sólo sometida a la acción de la gravedad. Pero la presencia del vínculo (hélice) hace que aparezca necesariamente una fuerza de reacción vincular. En este caso es perpendicular a la hélice, pues no hay rozamiento. La fuerza neta sobre la partícula en cada instante es
siendo  la fuerza de reacción vincular.
la fuerza de reacción vincular.

