



Parámetro arco de una hélice (G.I.A.)
De Laplace
Contenido |
1 Enunciado
Sea la hélice Γ descrita en un sistema de referencia cartesiano OXYZ por las siguientes ecuaciones paramétricas:
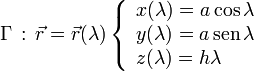
donde a y h son constantes conocidas.
- Determina la longitud recorrida sobre la hélice (parámetro arco) en función del parámetro λ.
- Obtén los vectores del triedro intrínseco en cada punto de dicha curva.
- Calcula su radio de curvatura.
2 Solución
2.1 Distancia recorrida
Podemos calcular la distancia recorrida sobre la hélice sumando los módulos de los  obtenidos al variar el parámetro una cantidad infinitesimal dλ. La expresión de es
obtenidos al variar el parámetro una cantidad infinitesimal dλ. La expresión de es

Derivando el vector tenemos

La distancia recorrida en este paso infinitesimal es

Si empezamos a contar la distancia recorrida en λ = 0 la distancia para un valor de λ es
Integrando obtenemos

La distancia recorrida sobre la curva recibe el nombre de parámetro arco. Puede utilizarse también para parametrizar la curva.
2.2 Triedro intrínseco
Calculamos el triedro intrínseco en cada punto de la curva usando las expresiones que dependen sólo de la parametrización de la curva, no de las variables cinemáticas ( velocidad y aceleración ).
El vector tangente es

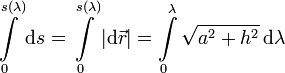
El vector normal se define en términos de la derivada del vector tangente respecto al parámetro.
Derivando el vector tangente

El módulo de este vector es

Y el vector normal es

El vector binormal se define como

2.3 Curvatura
La curvatura es el módulo de la derivada del vector tangente, cuando este está expresado en términos del parámetro arco. Sin embargo, no tenemos el vector  en términos del parámetro arco, sino del parámetro λ. Tenemos que usar la regla de la cadena para encontrar la derivada en función del parámetro natural.Esto es
en términos del parámetro arco, sino del parámetro λ. Tenemos que usar la regla de la cadena para encontrar la derivada en función del parámetro natural.Esto es

A partir de la última fórmula del primer apartado, podemos despejar λ a partir del parámetro arco

Y derivamos aquí

Con lo cual la curvatura es

El radio de curvatura es


