



No Boletín - Dos varillas (Ex.Feb/14)
De Laplace
Contenido |
1 Enunciado

La varilla rígida  (sólido "0"), de longitud
(sólido "0"), de longitud  , está vinculada mediante un par cilíndrico al eje vertical
, está vinculada mediante un par cilíndrico al eje vertical  del triedro fijo
del triedro fijo  (sólido "1"), de tal forma que dicha varilla se mantiene en todo instante perpendicular al eje . La varilla "0" rota alrededor del eje con velocidad angular constante
(sólido "1"), de tal forma que dicha varilla se mantiene en todo instante perpendicular al eje . La varilla "0" rota alrededor del eje con velocidad angular constante  (en el sentido mostrado en la figura) y, simultáneamente, su extremo
(en el sentido mostrado en la figura) y, simultáneamente, su extremo  recorre el citado eje con celeridad constante
recorre el citado eje con celeridad constante  (en el sentido indicado en la figura). Por otra parte, una segunda varilla rígida
(en el sentido indicado en la figura). Por otra parte, una segunda varilla rígida  (sólido "2"), de longitud
(sólido "2"), de longitud  , se encuentra articulada mediante un par de revolución al centro
, se encuentra articulada mediante un par de revolución al centro  de la primera, de tal forma que la varilla "2" se mantiene siempre contenida en el plano perpendicular a la varilla "0" que pasa por . El movimiento {20} viene dado por la rotación de la varilla "2" alrededor del eje de la varilla "0" (eje
de la primera, de tal forma que la varilla "2" se mantiene siempre contenida en el plano perpendicular a la varilla "0" que pasa por . El movimiento {20} viene dado por la rotación de la varilla "2" alrededor del eje de la varilla "0" (eje  ) con velocidad angular constante (en el sentido mostrado en la figura). Sea
) con velocidad angular constante (en el sentido mostrado en la figura). Sea  la base ortonormal asociada al triedro
la base ortonormal asociada al triedro  (sólido "0") que se define en la figura.
(sólido "0") que se define en la figura.
Determine las siguientes magnitudes:
- Velocidad

- Aceleración angular

- Aceleración

2 Caracterización de los movimientos elementales {01} y {20}
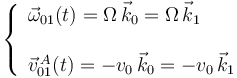
El movimiento de arrastre {01} (par cilíndrico) es un movimiento helicoidal alrededor de un eje fijo ( ), y podemos caracterizarlo mediante su reducción cinemática en el punto (las direcciones, los módulos y los sentidos de
), y podemos caracterizarlo mediante su reducción cinemática en el punto (las direcciones, los módulos y los sentidos de  y
y  se deducen del enunciado):
se deducen del enunciado):
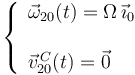
Por otra parte, el movimiento relativo {20} (par de revolución) es una rotación pura alrededor de un eje fijo ( ), y podemos caracterizarlo mediante su reducción cinemática en el punto (
), y podemos caracterizarlo mediante su reducción cinemática en el punto ( es nula por pertenecer al eje permanente de rotación {20}; y la dirección, el módulo y el sentido de
es nula por pertenecer al eje permanente de rotación {20}; y la dirección, el módulo y el sentido de  se deducen del enunciado):
se deducen del enunciado):
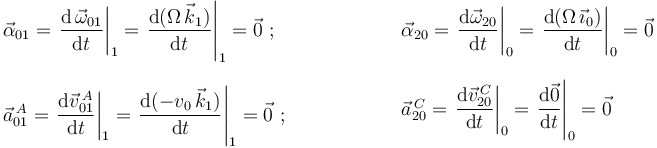
Con vistas al cálculo de aceleraciones, resulta interesante determinar también las aceleraciones angulares y las aceleraciones de los puntos y , respectivamente, en los movimientos de arrastre y relativo:
3 Velocidad {01} del punto C
La velocidad de arrastre se determina utilizando la ecuación del campo de velocidades {01}:

4 Aceleración angular {21}
Determinamos aplicando la ley de composición de aceleraciones angulares:

5 Aceleración {21} del punto C
Calculamos primero la aceleración de arrastre  (mediante la ecuación del campo de aceleraciones {01}):
(mediante la ecuación del campo de aceleraciones {01}):

y después la sustituimos en la ley de composición de aceleraciones para obtener la aceleración absoluta (en este ejercicio se anulan los correspondientes términos de aceleración relativa y de aceleración de Coriolis):


