



No Boletín - Cuestión sobre rodar, pivotar y deslizar (Ex.Sep/14)
De Laplace
1 Enunciado
Una esfera (sólido "2") se mueve sobre el plano  (sólido "1") de cierto sistema de referencia OXYZ, manteniéndose en todo instante el contacto puntual esfera-plano. La reducción cinemática del movimiento {21} en el punto de contacto
(sólido "1") de cierto sistema de referencia OXYZ, manteniéndose en todo instante el contacto puntual esfera-plano. La reducción cinemática del movimiento {21} en el punto de contacto  viene dada por:
viene dada por:
¿Cuál de las siguientes descripciones del movimiento de la esfera respecto al plano es la correcta?
(a) Rodadura y pivotamiento, sin deslizamiento.
(b) Rodadura y deslizamiento, sin pivotamiento.
(c) Pivotamiento y deslizamiento, sin rodadura.
(d) Rodadura, pivotamiento y deslizamiento.
2 Solución
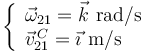
Los conceptos de rodar, pivotar y deslizar aparecen en el contexto del movimiento relativo {21} entre dos sólidos que mantienen contacto puntual en todo instante. Se define un vector unitario  ortogonal al plano tangente común a las superficies de ambos sólidos en el punto de contacto . Descomponiendo la velocidad angular
ortogonal al plano tangente común a las superficies de ambos sólidos en el punto de contacto . Descomponiendo la velocidad angular  y la velocidad del punto de contacto
y la velocidad del punto de contacto  , respectivamente, como sendas sumas de un vector perpendicular a y otro vector paralelo a (con la fórmula deducida en la teoría), se introduce la siguiente terminología:
, respectivamente, como sendas sumas de un vector perpendicular a y otro vector paralelo a (con la fórmula deducida en la teoría), se introduce la siguiente terminología:
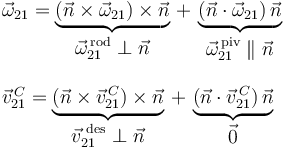
donde se denomina rodadura a la componente de rotación tangencial al contacto (perpendicular a ), se denomina pivotamiento a la componente de rotación perpendicular al contacto (paralela a ), y se denomina deslizamiento a la traslación tangencial al contacto (perpendicular a ). Obsérvese que no puede existir traslación perpendicular al contacto (paralela a ) por ser incompatible con el mantenimiento del contacto puntual entre ambos sólidos.
Pues bien, aplicando las anteriores fórmulas al ejercicio que nos ocupa, obtenemos:
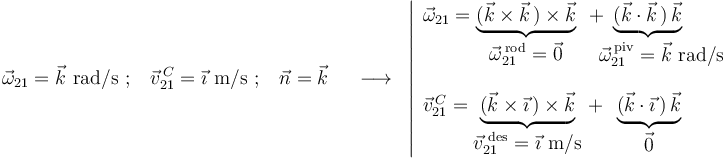
Por tanto, la respuesta correcta es la (c): el movimiento de la esfera respecto al plano es de "pivotamiento y deslizamiento, sin rodadura".

