



Movimientos Planos de Manivela y Disco, F1 GIA (Sept, 2012)
De Laplace
Contenido |
1 Enunciado

- Determinar el C.I.R. de dicho movimiento (I20), haciendo uso de procedimientos graficos.
- Utilizando como parámetro geométrico el ángulo θ indicado en la figura, obtener la reducción cinemática del movimiento {20} en el punto C,
 .
.
- Caracterizar el movimiento {20} en el instante en que θ = π / 2, indicando de forma razonada si se trata de una situación de: (a) rotación instantánea; (b) traslación instantánea; (c) movimiento helicoidal tangente, o (d) reposo instantáneo.
2 Solución
Antes de pasar a resolver las cuestiones propuestas en este ejercicio de movimientos planos relativos de sólidos rígidos, resulta conveniente proceder a la definición de los sistemas de referencia que asociaremos a cada uno de los sólidos. El disco de radio R y centro C (sólido “2”) y la barra OA (sólido “0”), realizan sendos movimientos planos respecto del plano fijo OX1Y1 en el cuál van a estar contenidos en todo instante y que, por tanto, adoptaremos como plano director de los movimientos. Tomamos como eje OY1 la dirección perpendicular a la superficie fija (sólido “1”) sobre la que rueda sin deslizar el disco y en la cual se halla articulada la barra OA en su extremo O.
Los sólidos “0” y “2” tendrán asociados sendos sistemas de referencia OX0Y0Z0 y CX2Y2Z2, tales que,

En cuanto al sólido “2”, su simetría en torno al eje CZ2 permite tomar como ejes CX2 y CY2 dos direcciones cualesquiera contenidas en el plano del disco y perpendiculares entre sí.
En cualquiera de los posibles movimientos relativos {ij} (sólido “i” respecto del “j”), se tendrá que la dirección del correspondiente vector rotación instantánea es constante:

Por otra parte, el disco y la barra OA se pueden mover, pero siempre contenidas en el plano OX1Y1. En consecuencia, la velocidad de cualquier punto en cualquiera de los posibles {ij} va a ser un vector paralelo a dicho plano y, por tanto, perpendicular a la dirección definida por el unitario constante  . Se tendrá, por tanto, que los elementos de las reducciones cinemáticas de cualquiera de los movimientos relativos instantáneos verifican las características del movimiento plano:
. Se tendrá, por tanto, que los elementos de las reducciones cinemáticas de cualquiera de los movimientos relativos instantáneos verifican las características del movimiento plano:

Si el vector rotación es no nulo, va a haber un punto I contenido en el plano director que, en el movimiento {ij}, tiene velocidad nula. Este punto se denomina centro instantáneo de rotación (C.I.R.) del movimiento ( ). Entonces, para todo punto P que se mueve solidariamente con el sólido “1”, se tendrá que:
). Entonces, para todo punto P que se mueve solidariamente con el sólido “1”, se tendrá que:
En el caso de una traslación instantánea en que todos los puntos tienen igual vector velocidad y el vector rotación es nulo, la anterior expresión matemática sigue siendo válida si se considera que el C.I.R. se encuentra en el infinito, en la dirección paralela al plano director y perpendicular a la de las velocidades instantáneas.
2.1 Posición de los C.I.R. de los tres movimientos relativos


El disco rueda sin deslizar sobre la superficie que hemos definido como sólido “1”. En consecuencia, el punto del sólido “2” que en cada instante se haya en contacto con el eje OX1, se encuentra en estado de reposo instantáneo. Si en todo instante denotamos como punto B dicha posición de contacto, se tendrá que:

Es decir, en cada instante de tiempo el C.I.R. del movimiento {21} se encuentra en el punto B de contacto entre el disco y la superficie fija. Obsérvese que la posición de dicho punto va cambiando durante el transcurso del movimiento, sin embargo, siempre va a estar en el eje sobre el eje OX1. Por tanto, los C.I.R. I21 e I01 definen en todo instante una recta Δ que coincide con el eje OX1. En virtud del teorema de los tres centros, el C.I.R. del movimiento {20} van a estar alineado en cada instante con los de los movimientos {01} y {21}. En consecuencia, el I20 debe encontrarse siempre sobre la recta Δ definida por O y B en cada instante:

Por otra parte, la expresión del campo de velocidades del movimiento {20} indica que la posición del C.I.R. I20, respecto de un punto arbitrario P, se encuentra en la dirección perpendicular a la velocidad del punto en dicho movimiento

Hay un punto concreto del disco para el cuál conocemos el todo instante la dirección de su velocidad en el movimiento {20}: el centro C del disco está obligado a desplazarse siempre a lo largo del carril practicado a lo largo de la barra OA, que coincide con la dirección OX0, de manera que:

En consecuencia, el C.I.R. del movimiento {20} se encuentra en cada instante en la recta que pasa por el centro C del disco y es paralela a la dirección del eje OY0 (perpendicular a OA):

Así que, en cada instante, el C.I.R. del movimiento {20} se halla en la intersección de las rectas Δ y Λ; es decir, donde la recta que pasa por el centro del disco y es perpendicular a la barra, corta al eje OX1:
La descripción analítica de dicho punto respecto del origen O de los sistemas de referencia asociados a los sólidos “1” y “0” se puede obtener sin más que tener en cuenta que, en todo instante, los puntos O, C e I20 son los vértices de un triángulo rectángulo cuyo ángulo recto se encuentra en el vértice C. Por tanto,

Las longitudes de los segmentos  y
y  pueden expresarse en cada instante en función del ángulo θ que forman con las direcciones horizontal y vertical, respectivamente. Teniendo en cuenta que la distancia entre el centro C del disco y el punto de contacto B es siempre constante e igual al radio del disco, se obtiene:
pueden expresarse en cada instante en función del ángulo θ que forman con las direcciones horizontal y vertical, respectivamente. Teniendo en cuenta que la distancia entre el centro C del disco y el punto de contacto B es siempre constante e igual al radio del disco, se obtiene:


2.2 Reducción cinemática del movimiento {20}
Para determinar la reducción cinemática instantánea de este movimiento, podemos seguir dos procedimientos distintos: el análisis directo de dicho movimiento relativo en cada instante, o la aplicación de la composición de movimientos relativos.
2.2.1 Análisis cinemático directo
El centro del disco (sólido ``2") está obligado a desplazarse por la barra OA (sólido ``1"), que coincide en todo instante con el eje OX0. Se tendrá,por tanto que:

ya que es la hipotenusa del triángulo rectángulo que en cada instante tiene por vértices los puntos O, B y C. La expresión de la velocidad instántánea del punto C en el movimiento {20} se obtiene derivando con respecto al tiempo el anterior vector posición, en el sistema de referencia OX0Y0Z0:

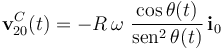
donde se ha tenido en cuenta que la velocidad angular de rotación ω de la barra, respecto de los ejes fijos es, por definición, la variación instantánea del ángulo θ, por unidad de tiempo:

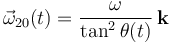
Una vez determinada la expresión de la velocidad instantánea de C, pordemos obtener el otro elemento de la reducción (es decir, el vector rotación  ) aprovechando que conocemos en cada instante la posición del C.I.R. del movimiento {20}. En el apartado anterior se determinó la dirección módulo y sentido del vector :
) aprovechando que conocemos en cada instante la posición del C.I.R. del movimiento {20}. En el apartado anterior se determinó la dirección módulo y sentido del vector :

Igualandon esta expresión con la obtenida por derivación del vector posición se obtiene,
2.2.2 Composición de movimientos relativos

donde  ;
;  , y
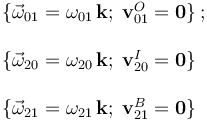
, y  son las posiciones que ocupan los C.I.R. en el instante arbitrario considerado. En cuanto a las componentes de los vectores rotación instantánea, sólo podemos conocer a priori el valor de ω01. De las fórmulas de Poisson se obtiene:
son las posiciones que ocupan los C.I.R. en el instante arbitrario considerado. En cuanto a las componentes de los vectores rotación instantánea, sólo podemos conocer a priori el valor de ω01. De las fórmulas de Poisson se obtiene:

Calculamos ahora las velocidades instantáneas del punto C en cada uno de los movimientos relativos:

La ley de composición de velocidades instantáneas establece que...
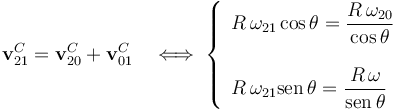
Teniendo en cuenta que estas relaciones deben cumplirse en cada instante t, cuando el parámetro geométrico que describe la posición en dicho instante vale θ(t), se obtiene:

Y sustityendo este último resultado en las expresiones de  y , obtenemos la reducción cinemática del movimiento {20} en el centro del disco, y para cualquier instante de tiempo:
y , obtenemos la reducción cinemática del movimiento {20} en el centro del disco, y para cualquier instante de tiempo:

2.3 Estado cinemático del disco respecto de la manivela en θ = π / 2
Consideremos el instante t0 en que la manivela OA está colocado perpendicularmente al eje OX1 sobre el que rueda sin deslizar el disco; es decir,

En dicho instante, el estado cinemático del disco en su movimiento respecto de la manivela, está completamente determinado por la correspondiente reducción cinemática:

Luego, en el intante t0, el disco (sólido ``2") se halla en reposo respecto de la manivela OA (sólido ``0"). Para determinar si se trata de una situación de reposo instantáneo, hay que comprobar si en un instante inmediatamente posterior a t0 alguno de los elementos de la reducción cinemática del movimiento {20} va a ser no nulo. Como sabemos, esto ocurrirá si las derivadas instantáneas de alguno de dichos elementos en el instante t0 es también un vector no nulo. Y puesto que tenemos la ley horaria para el vector rotación instantánea en dicho movimiento, y también para la velocidad instantánea del centro del disco, podemos calcular cualquiera de sus derivadas temporales. Por ejemplo


Por tanto, en el instante en que la manivela o barra OA forma un ángulo de π / 2 con la dirección OX1, el disco se encuentra en reposo instantáneo respecto de aquélla.

