



Horquilla y disco Segunda Prueba de Control (G.I.A.)
De Laplace
Contenido |
1 Enunciado

El sistema de la figura consiste en una horquilla semicircular (sólido "0"), que siempre está paralela al plano fijo O1X1Y1 (sólido "1"). El punto O de dicho aro (siempre el mismo) se desplaza con velocidad v sobre el eje O1Z1, a la vez que el aro gira con velocidad angular constante Ω alrededor de dicho eje fijo. Un disco de radio R (sólido "2"), se mueve respecto a "0" girando alrededor del diámetro común AB, con velocidad angular constante ω.
Nota: Los valores de Ω, ω y v pueden ser positivos o negativos.
- ¿Cuándo es nula la velocidad mínima del movimiento {21}?
- Qué debe ocurrir para que el eje instantáneo de rotación y mínimo deslizamiento pase por el centro del disco? Calcule en este caso la derivada temporal de la reducción cinemática
- ¿Qué condición debe cumplirse para que el movimiento {21} sea una rotación instantánea y el eje instantáneo de rotación pase por el centro del disco?
2 Solución
2.1 Reducciones cinemáticas
Vamos a encontrar las reducciones cinemáticas de los tres movimientos presentes.
2.1.1 Movimiento {01}
Esta es la rotación y traslación de la horquilla. Tenemos

2.1.2 Movimiento {20}
Esta es la rotación del disco. Tenemos

Observese que, para un observador que se mueve con la horquilla (sólido “0”) el punto C es un punto en reposo permanente pues, en todo instante se tiene que

2.1.3 Movimiento {21}
Usamos las leyes de composición.

Reducimos la velocidad en el punto C
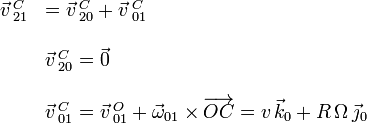
Por tanto

2.1.4 Velocidad mínima de {21} nula
El movimiento del disco respecto del sistema de referencia fijo será rotación instantánea cuando la velocidad mínima del movimiento {21} sea nula (con un vector rotación instantánea no nulo). Y esto ocurrirá cuando el invariante escalar sea nulo:

2.2 EIRMD para el movimiento {21}
Por definición, éste es el lugar geométrico formado por todos los puntos que se mueven solidariamente con el disco “2” y cuya velocidad, medida por el sistema de refencia “1”, es paralela a la rotación instantánea  . Y como sabemos, se trata de una recta paralela al dicho vector rotación y que pasa por un punto I21, cuya posición puede determinarse en cada instante a partir de la reducción cinemática:
. Y como sabemos, se trata de una recta paralela al dicho vector rotación y que pasa por un punto I21, cuya posición puede determinarse en cada instante a partir de la reducción cinemática:


La posición del punto I21, respecto del punto C utilizado en la reducción cinemática (centro de reducción), viene dada por el segmento orientado...

La posición de I21, respecto del punto O1 se obtiene fácilmente:

Es decir, el eje  está contenido en todo momento en un plano parelelo al OY0Z0 y pasa por un punto del eje OX0 (el I21), cuya posición está determinada por los valores de v, ω y Ω.
está contenido en todo momento en un plano parelelo al OY0Z0 y pasa por un punto del eje OX0 (el I21), cuya posición está determinada por los valores de v, ω y Ω.
2.2.1 EIRMD por el centro del disco
Para que pase por el punto C debe ocurrir

2.2.2 EIRMD por el centro del disco y rotación instantánea
Para que el movimiento {21} sea una rotación instantánea el invariante escalar debe ser nulo, esto es, debe cumplirse

Pero en este caso la posición de un punto del EIRMD respecto del punto C viene dada por
y el EIRMD no pasaría por C. De hecho pasaría por el punto O. Por tanto esta situación no puede ocurrir nunca.
2.3 Variación instantánea de las magnitudes cinemáticas del {21}
Para poder determinar la aceleración de cualquier punto del disco “2”, debemos conocer la derivada temporal de los elementos que constituyen las reducción cinemática de dicho movimiento; es decir:

De las relaciones del movimiento relativo, sabemos que...

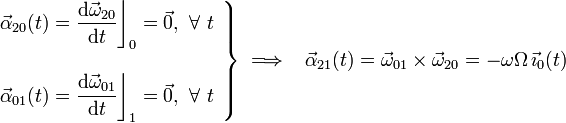
En esta expresión  es la variación instantánea del vector rotación en el movimiento {20}. Pero, como se vio al obtener la reducción cinemática de dicho movimiento,
es la variación instantánea del vector rotación en el movimiento {20}. Pero, como se vio al obtener la reducción cinemática de dicho movimiento,  es un vector constante en módulo, dirección y sentido para el observador “0”. Y exactamente lo mismo ocurre con el vector rotación
es un vector constante en módulo, dirección y sentido para el observador “0”. Y exactamente lo mismo ocurre con el vector rotación  , cuando es observado por el sistema de referencia fijo (sólido “1”), de manera que:
, cuando es observado por el sistema de referencia fijo (sólido “1”), de manera que:
La aceleración “absoluta” (en el movimiento {21}) del centro del disco, C, viene dada por la expresión general:

Como se indicó en la reducción cinemática del movimiento {20}, el centro C del disco es un punto en reposo permanente en dicho movimiento, luego tanto la velocidad  , como la aceleración
, como la aceleración  , son nulas en todo momento; entonces...
, son nulas en todo momento; entonces...

Teniendo en cuenta que  y asumiendo que, en general, el punto O de la horquilla recorre el eje O1Z1 con velocidad v(t), función del tiempo, se tendrá:
y asumiendo que, en general, el punto O de la horquilla recorre el eje O1Z1 con velocidad v(t), función del tiempo, se tendrá:

Como se vio anteriormente, para que el pase por el centro del disco, la velocidad de deslizamiento de la horquilla sobre el eje O1Z1 debía ser v = RΩ2 / ω, constante, al serlo los factores R, Ω y ω. Por tanto, en este caso particular se tendrá:


