



Esfera sobre dos raíles (G.I.A.)
De Laplace
Contenido |
1 Enunciado

Una esfera de radio R (sólido "2"), se desplaza sobre dos carriles circulares concéntricos fijos de radios R y 2R (sólido "1"), situados en un plano horizontal (ver figura). El movimiento de la esfera es tal que: i) en todo instante, rueda sin deslizar sobre ambos carriles, y ii) su centro C realiza un movimiento circular uniforme, siendo v0 el módulo de su velocidad. Considerando cómo sólido móvil intermedio (sólido "0") al plano O1X0Z0 que contiene en todo instante al centro C de la esfera (ver figura), calcula:
- Los ejes instantáneos o permanentes de rotación de los movimientos {21}, {20} y {01}.
- Reducciones cinemáticas de dichos movimientos,
- Para el punto de la esfera en contacto con el carril de mayor diámetro (punto B), los vectores
 y
y 
2 Solución
Este problema es algo diferente de los anteriores. Los datos
cinemáticos que nos dan son las velocidades absolutas de los puntos
A, $B</math> y $C</math>. Por un lado la esfera (sólido "2") rueda sin
deslizar sobre los carriles (sólido "1"), por tanto
 . Por otro lado, el centro de la
esfera realiza un movimiento circular uniforme, por lo que
. Por otro lado, el centro de la
esfera realiza un movimiento circular uniforme, por lo que
 . Usando la base vectorial del sólido "0" que gira
con el centro de la esfera, los datos cinemáticos son por tanto
. Usando la base vectorial del sólido "0" que gira
con el centro de la esfera, los datos cinemáticos son por tanto

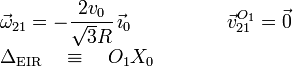
Además, podemos observar que el sólido "0", que sigue a la esfera en su movimiento, realiza una rotación permanente alrededor del eje O1Z1, de modo que podemos escribir

Dado que tenemos la velocidad del movimiento {21} en tres puntos no
alineados, esto nos permite calcular  . En este caso
analizaremos primero el movimiento {21} y a partir de él obtendremos
la descripción de los otros movimientos.
. En este caso
analizaremos primero el movimiento {21} y a partir de él obtendremos
la descripción de los otros movimientos.
2.1 Movimiento {21}
Como
, el eje instantáneo del movimiento
{21} pasa por esos dos puntos, es decir,
 . Pero entonces también pasa en todo
instante por el origen de coordenadas, O1. Podemos decir entonces que
el punto O1 es un punto fijo en este movimiento, y por tanto
. Pero entonces también pasa en todo
instante por el origen de coordenadas, O1. Podemos decir entonces que
el punto O1 es un punto fijo en este movimiento, y por tanto

Usando la ecuación del campo de velocidades, tenemos


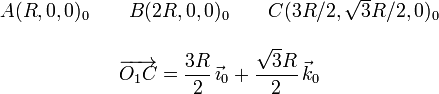
Necesitamos el vector geométrico  . Si nos fijamos en la
figura adjunta, observamos que el triángulo ABC es equilátero, pues
la distancia entre los raíles es R, el radio de la esfera. Los tres
ángulos son entonces de π / 3 radianes, con lo que podemos calcular
la altura del triángulo, que es la coordenada z0 del punto
C. Obtenemos las coordenadas respecto a O1 en la base vectorial del
sólido "0"
. Si nos fijamos en la
figura adjunta, observamos que el triángulo ABC es equilátero, pues
la distancia entre los raíles es R, el radio de la esfera. Los tres
ángulos son entonces de π / 3 radianes, con lo que podemos calcular
la altura del triángulo, que es la coordenada z0 del punto
C. Obtenemos las coordenadas respecto a O1 en la base vectorial del
sólido "0"
Podemos plantear ahora la ecuación obtenida a partir del campo de velocidades
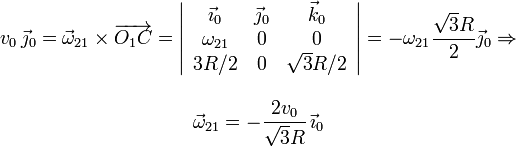
La reducción del movimiento {21} en O1 es
2.2 Movimiento {01}
Hemos de calcular la velocidad angular  . El punto $O_1</math> es
también un punto fijo en {01}, pues pertenece al eje de giro,
entonces
. El punto $O_1</math> es
también un punto fijo en {01}, pues pertenece al eje de giro,
entonces

Por definición, el sólido "0" se mueve de modo que el punto C esta siempre en el plano O1X0Z0. Entonces C es un punto fijo en el movimiento {20}, y por tanto

Ahora bien, usando la regla de composición podemos escribir

Pero podemos escribir  usando el campo de velocidades del
sólido en el movimiento {01}
usando el campo de velocidades del
sólido en el movimiento {01}
La reducción de {01} en O1 es
2.3 Movimiento {20}
Determinamos la velocidad angular a partir de la composición {20} = {21} + {10}

El punto O1 pertenece al eje instantáneo de {21} y {01}. Entonces también pertenece al eje del movimiento {20}. Tenemos

La reducción en O1 queda

2.4 Vectores y
Una vez reducido el movimiento {20} en C, podemos aplicar la
ecuación del campo de velocidades de un sólido rígido para calcular

Calculamos la aceleración aplicando la ecuación del campo
de aceleraciones del movimiento {21} y partiendo del punto fijo de
este movimiento, O1. Necesitamos el vector  . Podemos
obtenerlo derivando
. Podemos
obtenerlo derivando


Con esto podemos calcular el vector pedido

En a figura siguiente se muestran los ejes instantáneos de rotación de los tres movimientos analizados en el problema, así como los dos vectores pedidos.

