Esfera que rueda por un carril
De Laplace
1 Enunciado
En los experimentos de Galileo, éste hizo rodar una esfera de radio R por un carril de anchura 2b (b < R), de forma que la bola rueda apoyada en los bordes del carril, minimizando el rozamiento.
El carril se encuentra inclinado un ángulo β respecto a la horizontal.
La bola posee masa m y un momento de inercia I = γmR2 (con γ entre 2/5, esfera maciza y 2/3, esfera hueca).
Suponiendo que las fuerzas a ambos lados del carril son simétricas, determine la aceleración con la que la bola desciende por el carril, si inicialmente se encuentra en reposo.
Determine el ángulo β máximo para el carril si no se desea que la bola deslice.
Supóngase ahora que existe un rozamiento por rodadura de forma que en los puntos de contacto se ejerce una fuerza adicional  , siendo el eje X el tangente al carril en la dirección de avance. ¿Cuál es en ese caso la aceleración de la bola?
, siendo el eje X el tangente al carril en la dirección de avance. ¿Cuál es en ese caso la aceleración de la bola?
2 Caso sin rozamiento
Tomaremos un sistema de ejes en el que OX es el eje tangente al plano inclinado, OY el normal a él en el plano de movimiento y OZ el ortogonal a ambos hacia afuera del plano.
La esfera se encuentra sometida a una serie de fuerzas:
- Su peso

- Las fuerzas normales en los puntos de contacto A y B. Estas fuerzas son normales a la superficie de la esfera y por tanto son radiales.

- por simetría, las dos reacciones tienen el mismo módulo y direcciones simétricas. \delta es el ángulo que el vector radial forma con la superficie del plano. Este águlo verifica

- Las fuerzas de tangenciales en los puntos de contacto. De nuevo por simetría, ambas son iguales. Estas fuerzas son de rozamiento estático, ya que la velocidad en los puntos de contacto es nula
- para que no haya deslizamiento, estas fuerzas deben cumplir

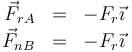
de manera que la aceleración del CM cumple la ecuación

Separando en componentes
Esto nos permite hallar el módulo de la fuerza normal
pero aun no la aceleración, ya que tenemos dos incógnitas: la propia aceleración y el valor de la fuerza tangencial.
Para completar el sistema necesitamos la ecuación para la rotación del sólido
Por tratarse de una esfera, el momento cinético es proporcional a la velocidad angular

La velocidad angular, por su parte, va en una dirección paralela a la recta que pasa por A y B (ya que estos dos puntos están en reposo instantáneo y por tanto el eje instantáneo de rotación pasa por ellos). Este eje es paralelo al eje Z

Esta velocidad se relaciona con la del CM observando que la velocidad del punto A debe ser nula

donde

esto nos da

Esto da el momento cinético
cuya derivada temporal vale
Esta cantidad debe ser igual a la resultante de los momentos de las fuerzas aplicadas

De estos términos, las fuerzas normales tienen momento nulo, por ser radiales y el peso también, por actuar sobre el propio CM. Queda

y por tanto

Llevamos esto a la ecuación para la aceleración

y de aquí despejamos la aceleración
Conocida la aceleración tenemos el valor de la fuerza de rozamiento estático

El límite de la inclinación lo da el que esta fuerza sea menor que la normal multiplicada por el coeficiente de rozamiento

que, en términos del ángulo, queda
3 Con rozamiento por rodadura
El rozamiento por rodadura se debe a la deformación de la esfera, por lo que no es inmediato su modelo en términos de un sólido rigido.
Una manera efectiva de hacerlo es suponer que la fuerza normal no se aplica en la vertical del CM sino un poco por delante, a una distancia c. De esta manera la fuerza normal produce un par que reduce la rotación de la bola.
Con este modelo, las ecuaciones para la fuerza no se modifican
puesto que el valor de la fuerza normal no ha cambiado
Sí se modifica la ecuación para la rotación

Sustituimos aquí los valores de la aceleración angular y de la fuerza normal y queda

y obtenemos una nueva fuerza de rozamiento estático

Esta fuerza es superior al caso sin rozamiento, lo cual reduce ligeramente el ángulo máximo antes de que empiece a deslizar.
Llevamos este resultado a la ecuación de movimiento lineal

y el único cambio es
el único cambio en el resultado es

Esto nos proporciona una forma de medir el efecto del rozamiento por rodadura. Si conocemos la aceleración para diferentes ángulos, podemos establecer la relación
con

con lo cual, ajustando una recta por el método de mínimos cuadrados resulta