



Equilibrio de una partícula sobre una hélice (GIA)
De Laplace
1 Enunciado

Un punto material M, de peso P, está vinculado a la hélice Γ, definida en el sistema de referencia cartesiano OXYZ por la ecuación vectorial  . Determina la posición de equilibrio estático del punto M si, además, este es atraído por el origen por una fuerza
. Determina la posición de equilibrio estático del punto M si, además, este es atraído por el origen por una fuerza  proporcional a la distancia entre ambos puntos, siendo k la constante de proporcionalidad.
proporcional a la distancia entre ambos puntos, siendo k la constante de proporcionalidad.
2 Solución
La condición de equilibrio mecánico para un punto material es que la
suma total de fuerzas actuando sobre él sea cero, tanto fuerzas activas
como de reacción vincular. En este caso estas fuerzas son el peso
 , la fuerza ejercida por el muelle y la
fuerza de reacción vincular
, la fuerza ejercida por el muelle y la
fuerza de reacción vincular  . Veamos como son cada una
de ellas.
. Veamos como son cada una
de ellas.
El punto M debe estar contenido en una curva, la hélice dada por el enunciado. Tiene entonces 1 grado de libertad, en este caso el ángulo θ. Al ser el vínculo liso, la fuerza de reacción vincular no puede tener componente en la dirección tangente a la curva. Es decir, debe ser de la forma

donde  y
y  son los vectores normal y binormal a
la curva, respectivamente. Como tenemos la ecuación vectorial de la
curva, podemos calcular estos vectores
son los vectores normal y binormal a
la curva, respectivamente. Como tenemos la ecuación vectorial de la
curva, podemos calcular estos vectores
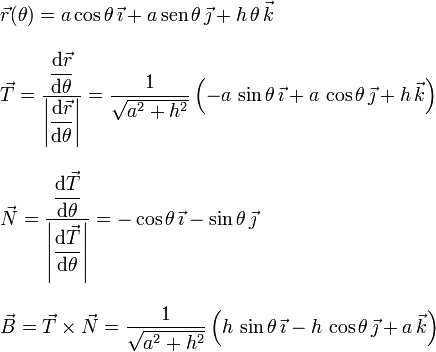
Utilizando estas expresiones ya podemos expresar
en términos del ángulo θ.
Nos dicen que la fuerza ejercida por el muelle es proporcional a la distancia entre el punto M y el origen O (por tanto la longitud natural del muelle es cero). Entonces

Por último, el peso apunta en la dirección negativa del eje OZ, por tanto

Ahora ya podemos plantear la condición de equilibrio, que va a traducirse en tres ecuaciones escalares, una por cada componente de la ecuación vectorial
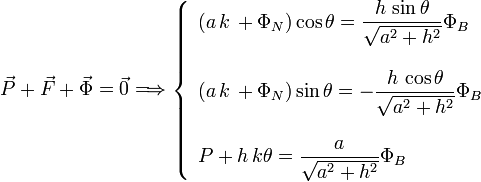
La solución con significado físico de estas ecuaciones es


