Ejercicio de movimiento plano, Enero 2014 (F1 GIA)
De Laplace
Contenido |
1 Enunciado

Una barra de longitud indefinida (sólido "0") se mueve siempre contenida en un plano fijo  (sólido "1"). En el punto fijo O del plano Π1 está articulado uno de los extremos de la barra, la cuál se mueve de manera que el ángulo que forma con el eje OX1 varía linealmente con el tiempo, según la ley horaria θ(t) = ωt. Un disco de radio R (sólido "2"), también siempre contenido en el plano OX1Y1, rueda sin deslizar sobre la barra "0". Respecto de un sistema de referencia OX0Y0 solidario con la barra "0", el centro C del disco realiza un movimiento rectilíneo uniforme de velocidad v0. En el instante inicial (t = 0), el centro del disco se halla en el eje OY1.
(sólido "1"). En el punto fijo O del plano Π1 está articulado uno de los extremos de la barra, la cuál se mueve de manera que el ángulo que forma con el eje OX1 varía linealmente con el tiempo, según la ley horaria θ(t) = ωt. Un disco de radio R (sólido "2"), también siempre contenido en el plano OX1Y1, rueda sin deslizar sobre la barra "0". Respecto de un sistema de referencia OX0Y0 solidario con la barra "0", el centro C del disco realiza un movimiento rectilíneo uniforme de velocidad v0. En el instante inicial (t = 0), el centro del disco se halla en el eje OY1.
- Obtenga los elementos de la reducción cinemática del movimiento {21} y su derivada temporal.
- Considérese el caso en que los parámetros del sistema verifican la relación v0 = ωR. ¿Qué tipo de movimiento realiza el disco respecto del plano fijo? Determine gráficamente, y de manera razonada, las posiciones de los C.I.R. correspondientes a los movimientos {01}, {20} y {21}.
- También en el caso de v0 = ωR, calcule las componentes intrínsecas de la aceleración y la velocidad del centro C del disco en movimiento {21}, en función del tiempo. Obtenga la ley horaria s(t) para la distancia recorrida por el centro C del disco, desde el instante inicial, sobre la trayectoria que dicho punto describe en el plano Π1.
2 Solución
2.1 Reducción del movimiento {21}

Vamos a usar la composición de movimientos {21} = {20} + {01}. Analicemos los dos movimientos mas simples.
2.1.1 Barra respecto del plano fijo {01}
Esta es la rotación de los ejes OX0Y0 respecto del plano fijo. El eje OX0 y el eje OX1 forman el ángulo θ, por lo que el vector rotación instantánea  es
es

Por otro lado, la barra gira en torno al punto O, por lo que este es el C.I.R. de este movimiento, es decir

Por tanto la reducción canónica de este movimiento es

Calculamos su derivada. Como ω es constante tenemos
Y además el punto O siempre está en reposo, por lo que
2.1.2 Disco respecto de la barra {20}
El enunciado nos da la velocidad del punto C, y nos dice que el disco rueda sin deslizar sobre la barra, por lo que  , siendo A el punto de contacto del disco con la barra. Al ser el movimiento plano sabemos que
, siendo A el punto de contacto del disco con la barra. Al ser el movimiento plano sabemos que  . Utilizamos el teorema de Chasles para encontrar el valor de ω20.
. Utilizamos el teorema de Chasles para encontrar el valor de ω20.
Comparando con el valor del enunciado obtenemos la reducción cinemática del movimiento en el punto C

Calculamos su derivada temporal. Como v0 es constante tenemos
Y también
2.1.3 Disco respecto al plano fijo {21}
Usamos las fórmulas de composición para obtener la reducción. Para el vector rotación tenemos

Calculamos 
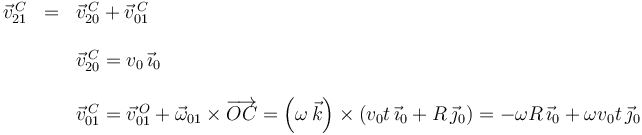
Hemos usado que la distancia entre el punto A y el punto O es v0t. La reducción cinemática en C es

Aplicamos las leyes de composición para calcular la derivada temporal

Y, finalmente

Hemos usado que  y
y  . Finalmente obtenemos
. Finalmente obtenemos

2.2 Localización de los CIRs en el caso v0 = ωR

Si los valores de los parámetros son tales que v0 = ωR, el vector rotación  se anula. Por tanto, el disco realiza una traslación respecto al plano fijo, con una velocidad
se anula. Por tanto, el disco realiza una traslación respecto al plano fijo, con una velocidad
Recordemos que en el caso de una traslación no es necesario poner la letra com superíndice en la velocidad, pues todos los puntos tienen la misma velocidad. La figura muestra los C.I.R. de los tres movimientos. El punto O es el I01. El punto de contacto entre el disco y la barra es el I20. Por el teorema de los tres centros, el I21 debe estar en la línea que une I01 y I20. Y al tratarse de una traslación, se localiza en el infinito.
2.3 Componentes intrínsecas en el movimiento {21} del punto C
Para los valores de los parámetros indicados en el enunciado tenemos

Obtenemos el vector tangente a partir del vector velocidad
La componente intrínseca de la velocidad es tal que  , por tanto
, por tanto
v = ωv0t
La componente tangencial de la aceleración es

y la normal es

Obtenemos la distancia recorrida integrando el desplazamiento infinitesimal

Para un instante arbitrario tenemos