Ejercicio de cinemática y dinámica del punto, Noviembre 2012 (F1 GIA)
De Laplace
Contenido |
1 Enunciado

 que forma el radiovector
que forma el radiovector  con el eje OX varía en el tiempo con velocidad angular constante,
con el eje OX varía en el tiempo con velocidad angular constante,
- Obtenga una expresión paramétrica de la trayectoria.
- Ley horaria para el módulo de la velocidad (celeridad).
- Componentes intrínsecas de la aceleración de la partícula.
- Fuerzas aplicadas sobre la partícula, expresadas en el triedro instrínseco, sabiendo que el plano OXY es perpendicular a la vertical gravitatoria definida por el vector gravedad
 .
.
2 Solución
2.1 Ecuación paramétrica de la trayectoria
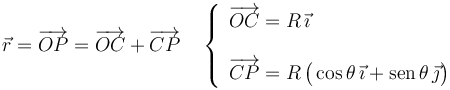
El segmento orientado  , equivalente al radiovector
, equivalente al radiovector  , puede descomponerse en la suma de los segmentos orientados
, puede descomponerse en la suma de los segmentos orientados  y
y  , que coinciden con sendos radios de la trayectoria seguida por la partícula P. Por tanto, si se considera que dicha trayectoria está contenida en el plano OXY, y para describirla se utiliza como parámetro el ángulo θ que forma el segmento orientado con el eje OX, se tendrá:
, que coinciden con sendos radios de la trayectoria seguida por la partícula P. Por tanto, si se considera que dicha trayectoria está contenida en el plano OXY, y para describirla se utiliza como parámetro el ángulo θ que forma el segmento orientado con el eje OX, se tendrá:


2.2 Celeridad o módulo de la velocidad


Como la partícula P está obligada a seguir una trayectoria circular con centro en el punto C y radio R, dicha ley horaria puede expresarse en términos del ángulo θ(t) que forma el segmento orientado en un instante arbitrario t, con la dirección  , siendo A el punto de la trayectoria correspondiente al instante inicial t = 0:
, siendo A el punto de la trayectoria correspondiente al instante inicial t = 0:

con el ángulo θ expresado en radianes. Y aunque no conocemos de forma explícita cómo es la ley horaria θ(t), podemos determinarla teniendo en cuenta las propiedades geométricas de la trayectoria y el dato proporcionado en el enunciado para la derivada temporal del ángulo  . Obsérvese que los segmentos y tienen ambos igual módulo, de valor R, al coincidir con sendos radios de la trayectoria. En consecuencia, el triángulo de vértices OCP es siempre isósceles con ángulos iguales en O y en P, de valor variable en el tiempo. Por otra parte, el ángulo del vértice C del triángulo es suplementario del ángulo θ(t), de manera que
. Obsérvese que los segmentos y tienen ambos igual módulo, de valor R, al coincidir con sendos radios de la trayectoria. En consecuencia, el triángulo de vértices OCP es siempre isósceles con ángulos iguales en O y en P, de valor variable en el tiempo. Por otra parte, el ángulo del vértice C del triángulo es suplementario del ángulo θ(t), de manera que

Llevando este resultado a la anterior expresión horaria de la celeridad, se obtiene:



Existen otros procedimientos para determinar la relación entre los ángulos θ y : por ejemplo, puede determinarse teniendo en cuenta que los segmentos orientados y tienen idéntica proyección sobre la dirección paralela al eje OY; es decir,

Calculando el módulo del radiovector en función del ángulo θ y utilizando las relaciones trigonométricas para su ángulo mitad, se obtiene:

2.3 Componentes intrínsecas de la aceleración
Estas componentes son las proyecciones del vector aceleración instantánea en las direcciones de los vectores tangente y normal a la trayectoria:

Como se sabe, la componente tangencial de la aceleración, aT(t), es igual a la variación instantánea de la celeridad, v(t). En el apartado anterior hemos comprobado que, en el movimiento bajo estudio, dicha magnitud es constante en el tiempo; por tanto, la aceleración tangencial será nula en todo instante:

La componente normal de la aceleración, aN(t), en un determinado instante es igual al cuadrado de la celeridad dividido por el radio de curvatura de la trayectoria en el punto ocupado por la partícula en dicho instante. En el caso que nos ocupa, el punto material P está obligado a recorrer una trayectoria circular, cuyo radio de curvatura en todos los puntos es igual al radio de dicha circunferencia. En consecuencia, la componente normal de la aceleración será también constante:

2.4 Fuerzas aplicadas, expresadas en el triedro instrínseco

 en un punto P es el vector unitario perpendicular al correspondiente radio , y contenido en el plano de la trayectoria (el OXY en el caso bajo estudio). Por su parte, el vector unitario
en un punto P es el vector unitario perpendicular al correspondiente radio , y contenido en el plano de la trayectoria (el OXY en el caso bajo estudio). Por su parte, el vector unitario  está también contenido en dicho plano, es perpendicular a , y está dirigido hacia el centro de curvatura. Se tendrá, por tanto, que el triedro instrínseco en el punto P de la trayectoria correspondiente a un ángulo θ, está formado por los vectores:
está también contenido en dicho plano, es perpendicular a , y está dirigido hacia el centro de curvatura. Se tendrá, por tanto, que el triedro instrínseco en el punto P de la trayectoria correspondiente a un ángulo θ, está formado por los vectores:
Como la partícula tiene masa m y se encuentra sometida a la acción del campo gravitatorio terrestre, descrito por el vector  , sobre ella actuará la fuerza peso, descrita en el triedro instrínseco por un vector que sólo tiene componente binormal:
, sobre ella actuará la fuerza peso, descrita en el triedro instrínseco por un vector que sólo tiene componente binormal:

Por otra parte, la partícula está obligada a moverse insertada en la circunferencia de centro C y radio R. Si el rozamiento entre ambos elementos es despreciable, este vínculo geométrico, bilateral y liso, puede modelarse mediante una fuerza de reacción vincular  que sólo actuaría para impedir desplazamientos no compatibles con las restricciones impuestas por el vínculo; es decir, lo único que podemos asegurar a priori sobre dicha fuerza vincular es que no puede tener componente tangencial:
que sólo actuaría para impedir desplazamientos no compatibles con las restricciones impuestas por el vínculo; es decir, lo único que podemos asegurar a priori sobre dicha fuerza vincular es que no puede tener componente tangencial:

Además de estas dos fuerzas, podemos proponer la existencia de una fuerza activa causante del movimiento, de componentes desconocidas a priori,

pero que podríamos determinar sin más que proyectar en las direcciones de los vectores , y  la ecuación vectorial que se obtiene al aplicar el principio de liberación y las leyes de la Dinámica para el punto material:
la ecuación vectorial que se obtiene al aplicar el principio de liberación y las leyes de la Dinámica para el punto material:

Las anteriores expresiones indican que si la partícula se mueve con celeridad constante, insertada en un aro horizontal sin rozamiento, la única condición a priori es que las fuerzas que actúan sobre la partícula no pueden tener componente tangencial. Por el contrario, las componentes normal FN y binormal FB de la fuerza causante del movimiento, podrían ser cualesquiera; las correspondientes componentes de la fuerza de reacción vincular en esas direcciones serían las adecuadas para que, aun bajo la acción del peso y de la fuerza  , la partícula realice un movimiento circular uniforme. Obsérvese que, en el caso ideal de rozamiento nulo que estamos considerando, la partícula podría realizar dicho movimiento incluso en ausencia total de la fuerza , siempre que las condiciones en el instante inicial se ve hubiesen verificado las condiciones iniciales adecuadas:
, la partícula realice un movimiento circular uniforme. Obsérvese que, en el caso ideal de rozamiento nulo que estamos considerando, la partícula podría realizar dicho movimiento incluso en ausencia total de la fuerza , siempre que las condiciones en el instante inicial se ve hubiesen verificado las condiciones iniciales adecuadas: