



Ejercicio de cinemática del sólido,Primera Convocatoria Ordinaria Enero 2012
De Laplace
Contenido |
1 Enunciado
Los extremos A y B de una barra de longitud L (sólido “2”), están obligados a moverse por sendos lados desiguales de un triángulo rectángulo isósceles (sólido “1”). Partiendo del punto O, el extremo A se desliza por el lado OC, también de longitud L, con velocidad constante de módulo v0. El extremo B se desliza por el lado OD de longitud  . Para indicar la posición de la barra en el sistema se sugiere utilizar el ángulo θ mostrado en la figura.
. Para indicar la posición de la barra en el sistema se sugiere utilizar el ángulo θ mostrado en la figura.

- Determine la posición del C.I.R. (punto I21) y una reducción cinemática del movimiento {21}, en función del valor del ángulo θ.
- Obtenga las derivadas con respecto al tiempo de los vectores de la reducción. Calcule la velocidad y la aceleración instantánea del extremo B en las posiciones inicial y final (extremo A en los puntos O y C, respectivamente).
- Obtenga la expresión paramétrica de la trayectoria seguida por I21 y la distancia entre este punto y O, en función del valor del ángulo θ. ¿Qué trayectoria sigue el C.I.R. I21, observada desde el sólido “1”?
- Determine las direcciones tangente y normal a la trayectoria seguida por el punto I21. Calcule las componentes intrínsecas de la velocidad y la aceleración de una partícula que, a lo largo del tiempo, fuese ocupando las sucesivas posiciones del I21.
2 Solución
2.1 Reducción cinemática
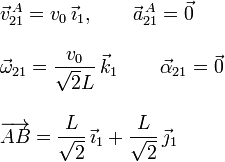
El punto A de la barra (sólido "2") se mueve respecto al triángulo (sólido "1") con velocidad constante a lo largo del eje OX1. Por tanto

Al ser un movimiento plano, el vector rotación  es perpendicular al plano del dibujo. Como el eje OZ apunta hacia fuera tenemos
es perpendicular al plano del dibujo. Como el eje OZ apunta hacia fuera tenemos

Si escogemos un eje OX2 que coincida con la barra y se mueva solidariamente con ella, el ángulo que forma con el eje OX1 es θ(t). Por tanto la componente de es precisamente la derivada temporal de este ángulo. Por tanto, la reducción cinemática del movimiento {21} en el punto A está compuesta por los vectores

Nos falta encontrar una expresión para  . Esto puede hacerse de varias maneras. Vamos a mostrar cuatro formas diferentes de hacerlo.
. Esto puede hacerse de varias maneras. Vamos a mostrar cuatro formas diferentes de hacerlo.
2.1.1 Usando la dirección de la velocidad 
Conocemos la dirección del vector rotación , la velocidad en un punto  y la dirección de la velocidad (el punto B esta obligado a moverse sobre la recta OD). Esta es información suficiente para calcular la componente del vector rotación.
y la dirección de la velocidad (el punto B esta obligado a moverse sobre la recta OD). Esta es información suficiente para calcular la componente del vector rotación.
Usando el teorema de Chasles, relacionamos las velocidades en los puntos A y B

Del dibujo obtenemos el vector geométrico 

El producto vectorial es

Por tanto la velocidad del punto B en el movimiento {21} es

El punto B está obligado a moverse sobre la recta OD. Como esta recta forma un ángulo π / 4 con el eje OX1, un vector paralelo a esta recta es

La velocidad debe ser paralela a  , por lo que
, por lo que
El producto vectorial es
Despejando obtenemos
La expresión final de la reducción cinemática del movimiento {21} es

Otra forma de llegar a este resultado es multiplicar vectorialmente por en la expresión del teorema de Chasles, y usar que

Desarrollando el doble producto vectorial

Hemos usado que  , pues son vectores perpendiculares. Como está multiplicado por un escalar, podemos despejar el vector, para obtener
, pues son vectores perpendiculares. Como está multiplicado por un escalar, podemos despejar el vector, para obtener

2.1.2 A partir del CIR del movimiento {21}
El CIR del movimiento {21}, I21 puede determinarse gráficamente. Para ello, trazamos por los puntos A y B las perpendiculares a sus velocidades respectivas. El punto de corte es I21. Como puede observase en el dibujo, el vector  puede expresarse como
puede expresarse como

Ahora usamos el teorema de Chasles para relacionar las velocidades en A y I21

De aquí obtenemos

2.1.3 A partir de la geometría del triángulo
Otra forma de obtener la derivada del ángulo es usando la geometría del problema. Del dibujo observamos que
Tenemos que
y

Sustituyendo arriba obtenemos

Derivando respecto al tiempo en ambos lados de la igualdad tenemos

de donde reobtenemos los resultados anteriores.
2.1.4 Usando el teorema del seno
La relación entre el ángulo y el tiempo del apartado anterior puede obtenerse también usando el teorema del seno en el triángulo OCD. Vemos en el dibujo que el ángulo  es
es  . Usamos el teorema del seno para relacionar los lados
. Usamos el teorema del seno para relacionar los lados  y
y 
Sabemos que  y
y  , por lo que despejando obtenemos
, por lo que despejando obtenemos

Derivando en ambos lados obtenemos la expresión de
2.1.5 Posición del CIR
El CIR puede determinarse geométricamente o, una vez que se tiene la reducción, usando la fórmula analítica
Esta expresión nos da el vector que va desde el punto A hasta el CIR. Haciendo los cálculos tenemos

La posición del centro de masas desde el origen es

2.2 Derivada de la reducción cinemática y velocidades y aceleración del punto B
La velocidad del punto es constante en el tiempo vista desde el sólido "1". Su aceleración es

Ambas derivadas son nulas.
Para la aceleración angular tenemos

Para hacer esta derivada usamos la regla de la cadena

Así pues, la derivada temporal de la reducción cinemática en el punto A es

2.2.1 Velocidad y aceleración en B en los instantes inicial y final
Dada la reducción cinemática y su derivada en A, podemos obtener la velocidad y la aceleración en el punto B usando el teorema de Chasles y la ecuación del campo de aceleraciones

Hemos usado que es un movimiento plano para simplificar la ecuación del campo de aceleraciones.
En el instante inicial el punto A está sobre el punto O, por lo que el ángulo es θ(t = 0) = π / 4. En este instante los vectores implicados valen
Calculando las operaciones obtenemos
En el instante final tf, el punto A coincide con el punto C, y el valor del ángulo es θ(tf) = π / 2. Los vectores relevantes son
Calculando las operaciones obtenemos
2.3 Ecuaciones paramétricas del CIR
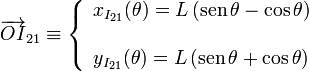
En el primer apartado hemos obtenido la posición del CIR respecto al punto O

Queremos expresar este vector en términos del parámetro θ. Para ello usamos la relación entre el tiempo y el ángulo que obtuvimos al aplicar el teorema del seno, (o bien al analizar la geometría del sistema)

De este modo las ecuaciones paramétricas quedan
La distancia al punto O es el módulo de ese vector

La distancia de I21 al punto O es constante, y se mueve siempre en el plano OX1Y1. Por tanto, la trayectoria que describe el CIR es una circunferencia de radio  con centro en el punto O.
con centro en el punto O.
2.4 Componentes intrínsecas de una partícula que se mueva como el CIR
El vector de posición de una partícula que se mueva como el CIR es

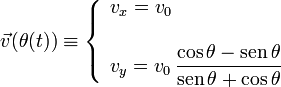
Es mas sencillo usar la segunda expresión para calcular la velocidad y la aceleración. Para calcular la velocidad derivamos respecto al tiempo las dos componentes

y

Con lo que la velocidad es
El módulo de la velocidad es

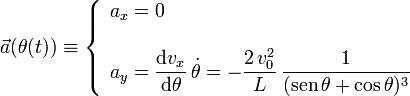
La aceleración la obtenemos derivando el vector velocidad
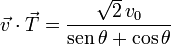
Podemos obtener el vector tangente a partir de la velocidad

La componente intrínseca de la velocidad es
La aceleración tangencial es

y la aceleración normal es


