



Dos partículas unidas por una barra (Sep. 2018 G.I.C.)
De Laplace
Contenido |
1 Enunciado

Las partículas A y B, ambas con masa m, están unidas por una barra rígida
de longitud 2L y masa despreciable. El punto C es el punto medio de la barra.
La partícula A está obligada a moverse en
el eje fijo OX, como se indica en la figura. Este contacto es liso. La barra
que une las partículas forma un ángulo θ(t) con el eje OX. La partícula
A se mueve con velocidad constante  . En el
instante inicial la partícula A se encontraba en el punto O y θ(0) = 0.
El sistema está sometido a la acción de la gravedad.
. En el
instante inicial la partícula A se encontraba en el punto O y θ(0) = 0.
El sistema está sometido a la acción de la gravedad.
- Encuentra la expresión de los vectores de posición
 ,
,  y
y  en función de v0, L, θ y t.
en función de v0, L, θ y t.
- Si el ángulo varía como
 , calcula la velocidad y aceleración de las partículas A y B y del centro de masas del sistema.
, calcula la velocidad y aceleración de las partículas A y B y del centro de masas del sistema.
- El movimiento descrito anteriormente está producido por una fuerza horizontal
 aplicada sobre la partícula A. Dibuja el diagrama de fuerzas del sistema y calcula la expresión de todas las fuerzas externas que actúan sobre él.
aplicada sobre la partícula A. Dibuja el diagrama de fuerzas del sistema y calcula la expresión de todas las fuerzas externas que actúan sobre él.
- Calcula la energía cinética del sistema y su momento cinético respecto de O en el instante t1 = πL / 2v0.
- Supongamos ahora que la partícula B se mueve de modo que la componente de su velocidad sobre el OX es constante e igual a 2v0. Encuentra y resuelve la ecuación diferencial que debe cumplir θ(t) para que esto sea posible.
2 Solución
2.1 Vectores de posición
Como la partícula A se mueve siempre sobre el eje OX con velocidad uniforme v0, y empieza su movimiento en el origen tenemos
El vector de posición del punto B es

Del dibujo vemos que

Entonces

Para el punto C tenemos

2.2 Velocidad y aceleración con θ(t) dada
En este caso tenemos
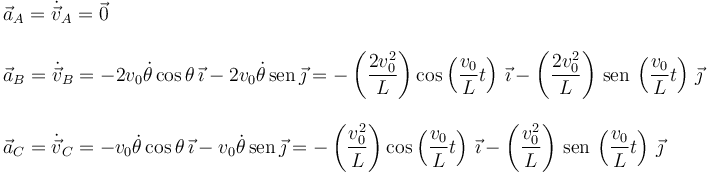
Las velocidades de las partículas A y B son

La barra no tiene masa. Como las dos masas son iguales, por simetría el Centro de Masas coincide con el punto C. Su velocidad es

Derivamos otra vez respecto del tiempo para obtener las aceleraciones
2.3 Fuerzas sobre el sistema

La imagen muestra las fuerzas externas que actúan sobre el sistema. Las fuerzas entre la barra y las partículas son internas y no afectan al movimiento. El Teorema de la Cantidad de Movimiento (T.C.M.) dice

La masa total del sistema es M = 2m. El Centro de Masas es el punto C. Las fuerzas pueden expresarse como
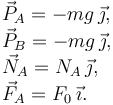
Las incógnitas son NA y F0. A partir de T.C.M. tenemos
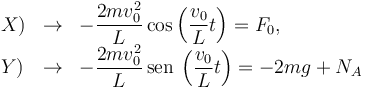
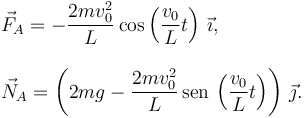
De aquí obtenemos F0 y NA. Tenemos
2.4 Energía cinética y momento cinético
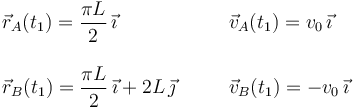
En el instante t1 = πL / 2v0 tenemos θ(t1) = π / 2. Entonces los vectores de posición y velocidad de las partículas A y B son
La energía cinética del sistema es la suma de la energía cinética de las dos partículas (la barra no tiene masa)

El momento cinético del sistema respecto de O es la suma del momento de las dos partículas (de nuevo, la barra no tiene masa)

El primer producto vectorial es cero, pues los dos vectores son paralelos.
2.5 Ecuación diferencial
La velocidad genérica del punto B es

La condición del enunciado es

Esta es una ecuación diferencial de variables separables para θ. Tenemos

Para calcular el valor de la constante de integración C imponemos la condición inicial

Entonces


