



Dos discos en varilla giratoria
De Laplace
Contenido |
1 Enunciado
Se tiene un sistema formado por dos discos idénticos, de masa m y radio R (sólidos “2” y “3”). Los discos está montados sobre un eje común (sólido “0”), que es una varilla ideal de masa despreciable. La unión de los discos a la varilla es mediante rodamientos que permiten un giro libre alrededor del eje. La varilla, a su vez está articulada en una rótula a un eje vertical. El punto de articulación, O, no es el centro de la varilla, G, sino que está a una distancia d del disco 2 y a una distancia b del disco 3.
El sistema está sometido a la acción del peso y la posible fuerza de reacción en O.
Tomamos un sistema de ejes rotatorio OX0Y0Z0 en el que el eje OZ0 es el vertical y el OX0 el que pasa por O y los centros de los dos discos. Todas las cantidades deben referirse a la base  .
Supongamos que los discos giran respecto a su eje común, OX0, con velocidades angulares constantes
.
Supongamos que los discos giran respecto a su eje común, OX0, con velocidades angulares constantes  y
y  , respectivamente, mientras la varilla gira respecto al eje vertical OZ_0 con velocidad angular constante
, respectivamente, mientras la varilla gira respecto al eje vertical OZ_0 con velocidad angular constante  . Para un instante dado:
. Para un instante dado:
- Determine las velocidades angulares de los dos discos respecto a un sistema fijo “1”,
 y
y  .
.
- Para cada disco determine su tensor de inercia respecto al sistema OX0Y0Z0.
- Calcule la cantidad de movimiento del sistema.
- Halle el momento cinético respecto al punto O de cada disco y el total, suma de los dos,
- Halle la energía cinética de cada disco y la total, suma de las dos.
- Determine la relación que debe haber entre ω2, ω3 y Ω en función de las masas, de g y de las dimensiones del sistema para que el sistema se mantenga girando uniformemente sin que sea preciso aplicar ningún par en O, de forma que el único momento sea el debido al peso.
- Halle la fuerza de reacción en O.


2 Velocidades angulares
Los datos que nos da el problema son

Por composición de velocidades

y

3 Tensores de inercia
El tensor de inercia de un disco respecto a unos ejes paralelos a OX0y0Z0 por su centro es de la forma

siendo A el centro del disco 2 y B el del disco 3, con

Aquí se ha aplicado que el eje AX0 es perpendicular por el centro del disco
y los ejes AZ0 y AY0 son paralelos a una superficie plana e iguales entre sí

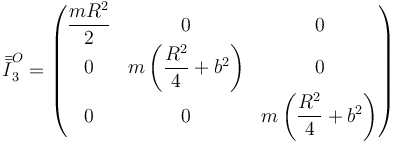
Para llevar este tensor al punto O aplicamos el teorema de Steiner

Y de la misma manera para el disco 3
4 Cantidad de movimiento del sistema
Para un sistema de partículas

con mT la masa total

y  la velocidad del CM respecto a un sistema fijo. En este caso el CM pertenece a la varilla “0” y se halla en la posición
la velocidad del CM respecto a un sistema fijo. En este caso el CM pertenece a la varilla “0” y se halla en la posición
siendo su velocidad

Por tanto la cantidad de movimiento del sistema es

5 Momento cinético
Por ser O un punto fijo, el momento cinético del disco 2 se puede calcular como

y de la misma manera para el 3

siendo el momento cinético total

6 Energía cinética
Por ser O un punto fijo

y para el disco 3

La energía cinética total del sistema vale, sumando y agrupando términos

7 Momento de las fuerzas
Para que el sistema se mantenga en equilibrio sin inclinarse debe cumplirse el teorema del momento cinético
con  el momento de las fuerzas externas, en este caso el peso. Este momento vale
el momento de las fuerzas externas, en este caso el peso. Este momento vale

Por su parte, la derivada del momento cinético en el sistema fijo vale
En el sistema 0 la derivada temporal es nula, ya que el cálculo que hemos efectuado para hallar  en la base produce un vector de coeficientes constantes. Por tanto queda solo el segundo término
en la base produce un vector de coeficientes constantes. Por tanto queda solo el segundo término

Como esta cantidad debe ser igual al momento del peso llegamos a la relación

8 Fuerza en el punto de apoyo
Aplicamos el teorema de la cantidad de movimiento
Aplicamos el mismo razonamiento que en el apartado anterior para la derivada respecto al tiempo

El primer término no representa otra cosa que la fuerza normal que produce el movimiento circular del CM alrededor de O.

