



Disco sobre barra en forma de L (MR G.I.C.)
De Laplace
Contenido |
1 Enunciado

El disco homogéneo de la figura (sólido "2") tiene masa m y radio R. Está conectado por su centro G con una estructura (sólido "0") formada por dos barras perpendiculares de masas despreciables y longitud R cada una. El disco puede rotar alrededor del eje AG, mientras que el sólido "0" puede rotar respecto a la línea OA. Se escoge unos ejes intermedios OX0Y0Z0 de modo que el plano OX0Y0 contiene siempre al sólido "0" y al centro del disco G. Los ejes GX2Y2Z2 son solidarios con el disco. El eje GY2 es paralelo al eje OY0, por lo que el plano GX2Z2 es siempre paralelo al plano OX0Z0 y el eje GX2 forma un ángulo ψ con la dirección del eje X1. El sistema está sometido a la acción de la gravedad con la dirección y sentido indicada en la figura.
- Determina las reducciones cinemáticas de los movimientos {01}, {20} y {21} en el centro de masas del disco, así como la derivada temporal del {21}. Determina el eje instantáneo de rotación del movimiento {21}.
- Calcula el momento cinético del disco respecto a G, su energía cinética y su energía potencial.
- Encuentra las integrales primeras del movimiento que puedas, justificando porqué lo son.
- Supongamos a partir de ahora que θ = π / 2 en todo instante.¿Como es la reducción cinemática {21} en G y su derivada temporal?
- En este último caso, calcula la desvinculación global {21} en G. Aplicando los teoremas fundamentales, encuentra la ecuación de movimiento para el grado de libertad restante.
2 Solución
2.1 Reducciones cinemáticas
2.1.1 Movimiento {01}
La línea OA es fija. Tenemos

La derivada temporal es

2.1.2 Movimiento {20}
Esto es una rotación de eje permanente GY0

La derivada temporal es

2.1.3 Movimiento {21}
Usamos las leyes de composición

Para las velocidades y aceleraciones absolutas de G tenemos
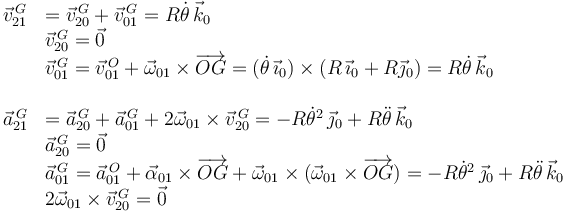
Para localizar un punto del eje Δ21 hacemos

El movimiento {21} es una rotación pura pues

2.2 Cinética
El tensor de inercia en G es
![\overset\leftrightarrow{I}_G
=
I
\left[
\begin{array}{ccc}
1 & 0 & 0\\
0 & 2 & 0\\
0 & 0 & 1
\end{array}
\right]_0
\qquad\qquad I = mR^2/4](/wiki/images/math/b/a/7/ba754edb0da651f520b7e0d81d318201.png)
En principio el tensor de inercia debe expresarse en el sistema "2", solidario con el disco. Pero los ejes GY0 y GY2 coinciden, y el disco tiene simetría de revolución alrededor de ellos. Por tanto, cualquier par de ejes perpendiculares a GY0 es un par de ejes principales. Por tanto, podemos usar el sistema "0" para calcular el momento cinético. Tenemos entonces
![\vec{L}_{G} =
\overset\leftrightarrow{I}_G\cdot\vec{\omega}_{21}
=
\overset\leftrightarrow{I}_G
=
I
\left[
\begin{array}{ccc}
1 & 0 & 0\\
0 & 2 & 0\\
0 & 0 & 1
\end{array}
\right]_0
\left[
\begin{array}{c}
\dot{\theta} \\ \dot{\psi} \\ 0
\end{array}
\right]_0
=
\left[
\begin{array}{c}
I\dot{\theta} \\ 2I\dot{\psi} \\ 0
\end{array}
\right]_0](/wiki/images/math/c/b/0/cb09f0d7c81631a55bb4d3ff0897e30d.png)
La energía cinética consta de la parte de traslación del centro de masas y de rotación
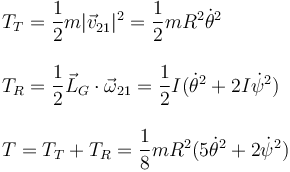
Para la energía potencial gravitatoria tomamos como origen el plano OX1Y1. Tenemos

2.3 Integrales primeras del movimiento
Las fuerzas y pares vinculares no hacen trabajo. Sólo el peso hace trabajo. Entonces se conserva la energía mecánica.

Las fuerzas que actúan sobre el disco son el peso y la fuerza vincular de la barra, ambas aplicadas en G. Hay un par de fuerzas vincular ejercido por la barra
![\vec{\Gamma}_{20} = [\Gamma_x, 0, \Gamma_z]_0](/wiki/images/math/2/6/e/26e1386e1a8b08eb698d57927b6ec7cb.png)
Así pues, las fuerzas sobre el disco cortan al eje GY0 y el par vincular no tiene componente sobre este eje. Entonces, la proyección del momento angular sobre ese eje se conserva

2.4 Caso θ = π / 2
En esta situación los ejes del sistema "0" coinciden con los del "1". Tenemos

La reducción cinemática pedida es

Su derivada es

El movimiento es simplemente una rotación alrededor de su eje de simetría fijo.
2.4.1 Desvinculación global y ecuación de movimiento
De la reducción cinemática obtenemos que la reducción vincular en este caso simplificado es
![\vec{\Phi}^{\,G}_{21} = [ G_x, G_y, G_z]_0, \qquad
\vec{\Gamma}_{21} = [\Gamma_x, 0, \Gamma_z]_0](/wiki/images/math/f/3/2/f32bb1276467c6a1f17c85efe4f0b3bb.png)
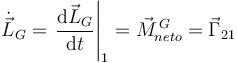
Podemos obtener una ecuación para el grado de libertad de movimiento aplicando el Teorema del Momento Cinético en el centro de masas del disco
En este caso los sistemas "0" y "1" coinciden en todo instante de tiempo. Por tanto
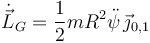
Como la componente en  del par neto es nula, tenemos
del par neto es nula, tenemos


