



Disco articulado con una varilla (G.I.A.)
De Laplace
Contenido |
1 Enunciado

El mecanismo de la figura está formado por un disco (sólido "0"), de radio R; y por una varilla OA (sólido "2"), de longitud 2R, articulada en su extremo O al centro del disco. El disco rueda sin deslizar sobre la recta fija (sólido "1") de ecuación y1 = − R, mientras que el extremo A de la varilla está obligado a deslizar sobre el eje O1Y1. Sabiendo que el mecanismo se mueve conforme a la ley horaria θ(t) = ωt (donde ω es una constante conocida), se pide:
- Los vectores de posición,
 ; velocidad,
; velocidad,  ; y aceleración
; y aceleración  , del movimiento absoluto del extremo A de la varilla. ¿Qué tipo de movimiento describe dicho punto?
, del movimiento absoluto del extremo A de la varilla. ¿Qué tipo de movimiento describe dicho punto?
- Reducciones cinemáticas (vectores velocidad angular y velocidad de un punto) de los movimientos {21}, {01} y {20}.
- Determinación gráfica y analítica de la posición del C.I.R. del movimiento {21}.
2 Solución
2.1 Cálculo del vector de posición, velocidad y aceleración del punto A en el movimiento {21}
El extremo A de la varilla está situado siempre sobre el eje O1Y1. Su posición puede determinarse en la escuadra "1" como

Como esta expresión es válida en todo instante y está expresada en la base del sólido "1", podemos derivarla para calcular la velocidad y la aceleración pedidas
Para determinar el tipo de movimiento que realiza el punto A, observemos que se cumple

Es decir, es un movimiento armónico simple a lo largo del eje O1Y1, centrado en O1, de frecuencia ω y amplitud 2R.
2.2 Reducciones cinemáticas de los movimientos
2.2.1 Movimiento {21}
Hemos calculado  . Para determinar
. Para determinar  necesitamos
la velocidad en otro punto. Para ello vamos a expresar la posición del
otro extremo de la varilla en la base de la escuadra O1X1Y1. El
punto O se mueve siempre a lo largo del eje O1X1. Por
trigonometría tenemos
necesitamos
la velocidad en otro punto. Para ello vamos a expresar la posición del
otro extremo de la varilla en la base de la escuadra O1X1Y1. El
punto O se mueve siempre a lo largo del eje O1X1. Por
trigonometría tenemos

De nuevo podemos derivar esta expresión para calcular 

Teniendo en cuenta que  , la ecuación del
campo de velocidades nos permite plantear la ecuación
, la ecuación del
campo de velocidades nos permite plantear la ecuación
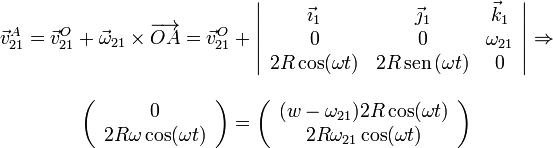
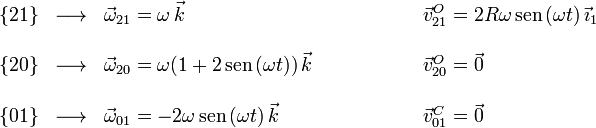
Por tanto ω21 = ω y la reducción en el punto O es

2.2.2 Movimiento {01}
El disco rueda sin deslizar sobre la línea y1 = − R. Por tanto el
punto de contacto es el CIR y su velocidad en este movimiento es nula,
 . Por otro lado, aún no podemos determinar la
velocidad angular de este movimiento. Por tanto lo que sabemos por
ahora es
. Por otro lado, aún no podemos determinar la
velocidad angular de este movimiento. Por tanto lo que sabemos por
ahora es

2.2.3 Movimiento {20}
El punto O pertenece tanto al sólido "2" como al "0". Por tanto es un punto fijo en este movimiento. La reducción en O es

2.2.4 Composición {21} = {20} + {01}
La velocidad puede escribirse

donde y  son conocidas.
Ahora podemos calcular
son conocidas.
Ahora podemos calcular 

Sustituyendo tenemos

Para obtener  recurrimos a la composición de velocidades
angulares
recurrimos a la composición de velocidades
angulares

Por tanto, las reducciones pedidas son
2.3 Determinación del CIR del movimiento {21}

2.3.1 Gráfica
Tenemos y . Si trazamos en cada punto la
recta perpendicular a sus velocidades respectivas el punto de corte
nos da I21, como se indica en el dibujo
2.3.2 Analítica
Partiendo de , la posición de I21 es

Podemos comprobar que ambos métodos dan el mismo resultado.

