Cono rotando con punto fijo (Nov. 2018)
De Laplace
Contenido |
1 Enunciado

Un cono con ángulo de abertura π / 4 y radio de la base R se mueve de modo
que rueda sin deslizar sobre el plano fijo "1" y su vértice C permanece fijo
sobre el eje OZ1. La base del cono permanece siempre perpendicular al plano OX1Y1. El sólido auxiliar "0" se escoge de modo que el plano
X0Z0 contiene siempre a los puntos A, B y C del cono. El sólido "0"
rota alrededor del eje OZ1 con velocidad angular constante  .
.
- Localiza y dibuja los ejes de rotación de los movimientos {01}, {20} y {21}. ¿Qué tipo de eje es cada uno de ellos?
- Calcula las reducciones cinemáticas en G de los tres movimientos relativos.
- Calcula las derivadas temporales de las reducciones cinemáticas en G de los tres movimientos relativos.
2 Solución
2.1 Análisis del enunciado
De los datos del enunciado podemos deducir los siguientes hechos:
- El cono rueda sin desliar sobre el plano, por tanto
 .
.
- El punto C es fijo sobre el eje OZ1. Entonces
 .
.
- Del dibujo vemos que el movimiento {01} es un par de revolución con
 y
y  .
.
- También relacionado con este movimiento vemos que el centro de la base del cono no se mueve respecto al plano OX0Z0, por lo que
 .
.
2.2 Ejes de los movimientos

La figura de la derecha muestra la localización de los ejes. Son
Como y  , el eje del movimiento {01} es
, el eje del movimiento {01} es  . Es un eje permanente de rotación.
. Es un eje permanente de rotación.
Como  tenemos
tenemos  . Es un eje instantáneo de rotación.
. Es un eje instantáneo de rotación.
Por último, con la composición {21}={20} + {01}. Aplicándola en C tenemos

Además,  , por lo que el eje del movimiento {20} es
, por lo que el eje del movimiento {20} es  es un eje permanente de rotación.
es un eje permanente de rotación.
2.3 Reducciones cinemáticas
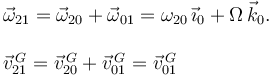
Movimiento {01} En el análisis previo ya hemos obtenido la reducción cinemática de este movimiento

Movimiento {20} Del análisis de los ejes tenemos

Movimiento {21} Usando la composición {21} = {20} + {01} obtenemos
Para calcular esta velocidad usamos la ecuación del campo de velocidades del movimiento {01}

Por otro lado sabemos que . Usando la ecuación del campo de velocidades del movimiento {21} obtenemos

Comparando los dos valores obtenemos ω20 = − Ω.
Con esto tenemos las tres reducciones cinemáticas
2.4 Derivadas temporales de la reducciones cinemáticas
Movimiento {01}: al ser una rotación de eje permanente tenemos
Usamos la ecuación del campo de aceleraciones del movimiento {01} para calcular la aceleración en G

Movimiento {20}: también es una rotación de eje permanente, por lo que
Movimiento {21} Utilizamos las leyes de composición