



Base vectorial girada
De Laplace
Contenido |
1 Enunciado
Considere la terna de vectores

- Pruebe que constituyen una base ortonormal dextrógira. ¿Cómo están situados estos vectores?
- Halle la transformación inversa, es decir, exprese
 como combinación de
como combinación de  .
.
- Para el caso particular en que tg(θ) = 3 / 4, particularice las ecuaciones de transformación y exprese el vector
 en la nueva base.
en la nueva base.
2 Base ortonormal dextrógira
2.1 Base ortonormal
Para demostrar que se tra de una base ortonormal hay que probar que son unitarios y ortogonales entre sí, es decir
Calculamos entonces los productos escalares:
- De
 consigo mismo
consigo mismo

- De con
 (y viceversa, por la conmutatividad)
(y viceversa, por la conmutatividad)

- De con
 (y viceversa). Es fácil ver que son ortogonales ya que no tiene componente en
(y viceversa). Es fácil ver que son ortogonales ya que no tiene componente en 

- De consigo mismo

- De con (y viceversa). Se anula el producto escalar por la misma razón que el de con

- De consigo mismo

Por tanto, hemos demostrado que la relación anterior para los productos escalares se cumple y la base es ortonormal.
2.2 Base dextrogira
Para demostrar que se trata de una base dextrógira hemos de probar que se cumple la regla de la mano derecha, es decir, que

Probamos la primera de las igualdades

De la misma manera se demuestran las otras dos igualdades. Una forma alternativa de demostrarlas es observar que

Aplicamos las propiedades del doble producto vectorial

y de la misma manera se obtiene la tercera

por lo que la base es ortonormal y dextrógira.
Esta base supone una rotación de un ángulo θ alrededor del eje OZ.

3 Transformación inversa
La transformación inversa consiste en escribir la base canónica como combinación lineal de la base , es decir, escribir  en la forma
en la forma

para ello, aplicamos que las componentes de un vector en una base ortonormal se obtienen proyectando sobre cada vector de esa base

y que el producto escalar es independiente de la base que se emplee para calcularlo. En particular podemos emplear la propia base canónica. En ese caso las componentes de serán

y por tanto

De la misma manera obtenemos

y, trivialmente,

Gráficamente, lo que hacemos ahora es proyectar ortogonalmente la antigua base sobre la nueva.

4 Caso particular
En el caso particular tg(θ) = 0.75 = 3 / 4 el seno y el coseno valen

con lo que la relación entre las bases se particulariza a

Para hallar las componentes de
aplicamos de nuevo que
lo que nos da
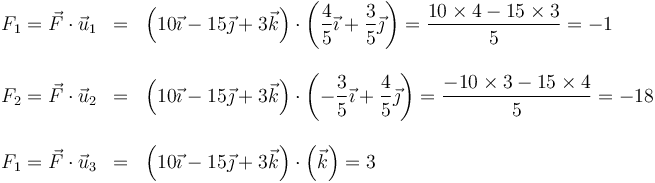
y por tanto la expresión de  en esta base es
en esta base es


Hay que destacar que aunque las componentes cambien, el vector en sí no se ha visto modificado.
Podemos ver que el módulo del vector no se ve afectado porque usemos una base u otra


