Barra que desliza en eje rotatorio (CMR)
De Laplace
Contenido |
1 Enunciado
El armazón de barras paralelas a los ejes OX0 y OZ0 (sólido “0”) rota alrededor del eje vertical fijo OZ1, de tal modo que el eje OX0 permanece siempre contenido en el plano horizontal fijo OX1Y1 (sólido “1”). Por otra parte, la varilla AB (sólido “2”), de longitud b, se mueve de forma que su extremo A desliza a lo largo del eje OX0, mientras que su extremo B desliza a lo largo del eje OZ0. Utilizando los ángulos θ y φ (definidos en la figura), así como sus derivadas temporales de primer y segundo orden, determine:
- La velocidad de A, B y G (siendo G el punto medio de la barra) en los movimientos {01}, {20} y {21}, así como la velocidad angular
 .
.
- ¿De qué tipo es el movimiento {21}? ¿Dónde está su EIRMD?
- La aceleración angular
 y las aceleraciones de A, B y G en los movimientos {01}, {20} y {21}
y las aceleraciones de A, B y G en los movimientos {01}, {20} y {21}

2 Velocidades
2.1 De B
2.1.1 En el movimiento {01}
Este es el cálculo más fácil. B se halla en el propio eje de rotación de este movimiento, por lo que

2.1.2 En el movimiento {20}
Esta velocidad la calculamos conjuntamente con la de A, ya que el movimiento de la barra deslizando sobre le eje horizontal y el vertical es idéntico al del “problema de la escalera”.
La velocidad angular de este movimiento es

Para sacar el sentido de esta velocidad angular conviene ayudarse de la regla de la mano derecha y ver para donde apunta el pulgar si θ aumenta.
Las velocidades de A y B cumplen

Aplicando el campo de velocidades de un sólido rígido

donde

Introducimos las abreviaturas usuales S = sen(θ) y C = cos(θ). Queda

Igualando componente a componente nos queda

En forma vectorial
2.1.3 En el movimiento {21}
Una vez que tenemos las dos anteriores, la tercera es inmediata

2.2 De A
2.2.1 En el movimiento {20}
Esta ya le hemos calculado en el apartado anterior
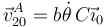
2.2.2 En el movimiento {01}
Esta corresponde a un movimiento de rotación alrededor de OZ1

2.2.3 En el movimiento {21}
Por composición de velocidades

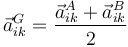
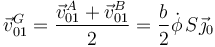
2.3 De G
El punto G es el central entre A y B. Al ser el campo de velocidades una función lineal de la posición el valor en el punto medio es igual a la media de los valores en los extremos. Así tenemos
2.3.1 En el movimiento {01}
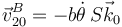
2.3.2 En el movimiento {20}

2.3.3 En el movimiento {21}
O bien calculamos de nuevo la media o bien, directamente,

2.4 Velocidad angular
Las velocidades angulares de las dos rotaciones {20} y {01} ya las hemos usado y valen

por lo que la de la composición es

3 Clasificación del movimiento
Para clasificar el movimiento necesitamos la velocidad angular y la velocidad de un punto. Por ejemplo,

La velocidad angular no es nula. Tampoco es perpendicular a la velocidad lineal, en general, ya que

Solo cuando una de las dos velocidades angulares se anula o la barra está completamente vertical el movimiento se reduce a una rotación.
La posición del un punto del EIRMD la calculamos como
y respecto al origen de coordenadas

La ecuación del eje es

4 Aceleraciones
4.1 Aceleración angular
Para los movimientos {20} y {01}, que tienen ejes permanentes

y para el movimiento compuesto {21}

4.2 Aceleración de B
4.2.1 En el movimiento {01}
Como ocurre con la velocidad, al estar en el eje permanente de rotación

4.2.2 En el movimiento {20}
La calculamos conjuntamente con la de A, como hicimos para la velocidad. En este movimiento se cumple

y por la ecuación del campo de aceleraciones

Sustituimos aquí y queda

Igualamos componente a componente y resulta

y, en forma vectorial,

4.2.3 En el movimiento {21}
Por el teorema de Coriolis

Sustituimos cada término y queda

El término de Coriolis se anula por tratarse del producto vectorial de dos vectores paralelos.
4.3 Aceleración de A
4.3.1 En el movimiento {20}
Esta ya la hemos calculado

4.3.2 En el movimiento {01}
Esta es la correspondiente a un movimiento de rotación en torno a OZ1

4.3.3 En el movimiento {21}
Aplicamos el teorema de Coriolis

lo que nos da


4.4 Aceleración de G
Como con la velocidad, la aceleración en el punto medio es igual a la media de las aceleraciones, por lo que para los tres movimientos se cumple