



Barra empujando placa con vértice fijo (MR G.I.C.)
De Laplace
Contenido |
1 Enunciado
2 Barra empujando placa con vértice fijo

El sistema de sólidos de la figura está formado por una varilla (sólido "2", masa m, longitud  ) y por una placa cuadrada (sólido "0", masa m, lado l0 = 2a) articulados entre sí en el punto B. Sobre el eje OX1 se apoyan el extremo A de la barra y el lado BD del cuadrado. Todos los contactos son lisos, salvo el apoyo del cuadrado, donde el coeficiente de rozamiento μ es tal que el deslizamiento es imposible. Sobre el extremo A se aplica una fuerza horizontal
) y por una placa cuadrada (sólido "0", masa m, lado l0 = 2a) articulados entre sí en el punto B. Sobre el eje OX1 se apoyan el extremo A de la barra y el lado BD del cuadrado. Todos los contactos son lisos, salvo el apoyo del cuadrado, donde el coeficiente de rozamiento μ es tal que el deslizamiento es imposible. Sobre el extremo A se aplica una fuerza horizontal  donde λ es un parámetro del problema. Inicialmente A coincide con O.
donde λ es un parámetro del problema. Inicialmente A coincide con O.
- Obtén el sistema de ecuaciones que permite determinar la ecuación diferencial del movimiento y las fuerzas vinculares del problema.
- Suponiendo λ = λ0(cte.), demuestra que el trabajo de
 es conservativo, con una energía potencial VF(x) = − F0x, donde F0 = 2λ0mg. Obtén el movimiento del sistema en forma de integral primera, suponiendo reposo inicial.
es conservativo, con una energía potencial VF(x) = − F0x, donde F0 = 2λ0mg. Obtén el movimiento del sistema en forma de integral primera, suponiendo reposo inicial.
3 Solución
3.1 Geometría del problema

En la figura de la izquierda se muestra la relación entre los parámetros geométricos x, θ y ψ. Llamamos  . La barra y la diagonal B'D de la placa forman siempre un triángulo isósceles. Vemos entonces que la relación entre los ángulos es
. La barra y la diagonal B'D de la placa forman siempre un triángulo isósceles. Vemos entonces que la relación entre los ángulos es

Por otro lado, en t = 0 el punto A estaba sobre O, y la placa estaba completamente apoyada sobre el eje OX1. Por tanto θ(0) = π / 4 y  . Entonces
. Entonces

Vemos que el movimiento está descrito por un sólo grado de libertad. Escogeremos el ángulo θ para describirlo
3.2 Cinemática del problema
Tanto el sólido "2" como el "0" describen una rotación plana. Vamos a encontrar las reducciones cinemáticas de estos movimientos.
Movimiento {21}

Necesitaremos la velocidad y la aceleración en el centro de masas de la barra:
Hemos utilizado la versión simplificada de la ecuación del campo de aceleraciones, pues el movimiento es plano. El vector geométrico es

Operando llegamos a

Movimiento {01}

Necesitaremos la aceleración en el centro de masas de la placa:

De nuevo el movimiento es plano. El vector geométrico es

Operando llegamos a

3.3 Fuerzas sobre las placas

La figura de la derecha muestra las fuerzas que actúan sobre cada sólido. Vamos a expresarlas en el sistema OX1Y1.
Para el sólido "0"
Para el sólido "2" tenemos
3.4 Ecuaciones de movimiento
Tenemos 6 incógnitas en el problema, a saber

Aplicando el T.C.M. y el T.M.C. en cada sólido obtenemos 6 ecuaciones, por lo que podemos resolver el problema.
3.4.1 Sólido "2"
T.C.M. en el sólido "2"

Aplicamos el T.M.C. en el centro de masas
La derivada del momento cinético es
El momento de inercia es el de una barra respecto a un eje perpendicular a ella que pasa por su centro de masas
Para los momentos tenemos

Los vectores geométricos son

Operando tenemos

Aplicando el T.M.C. tenemos

3.4.2 Sólido "0"
T.C.M. en el sólido "0"

Aplicamos el T.M.C. en el punto D, que es un punto fijo

La derivada del momento cinético es

El momento de inercia es el de una placa cuadrada respecto a un eje perpendicular a ella que pasa por el vértice D. El momento de inercia respecto a un eje perpendicular a la placa cuadrada que pasa por se su centro de masas es

Usando el teorema de Steiner el momento de inercia respecto a un eje que pasa por D es

Entonces
Para los momentos tenemos

Los vectores geométricos son

Recordemos que la diagonal de la placa es  .
Operando tenemos
.
Operando tenemos

Aplicando el T.M.C. tenemos

3.4.3 Ecuaciones
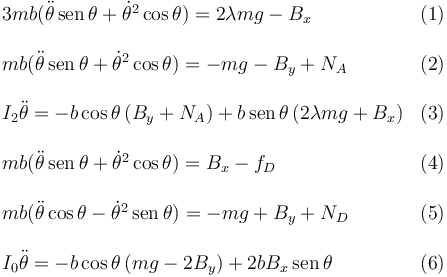
Reunimos aquí las seis ecuaciones que hemos encontrado
3.5 Caso con λ constante
Si λ = λ0, constante, la fuerza es

con F0 = 2λ0mg. El trabajo realizado por la fuerza en un desplazamiento infinitesimal del punto A es

Para que sea potencial debe ocurrir que
dVF = − dW(F0) = − F0dx
sea integrable. Como F0 es constante tenemos
Hemos tomado como referencia de energía potencial VF(x = 0) = 0. Las fuerzas sobre la placa en D no realizan trabajo, pues el punto D es fijo. Entonces sólo  y el peso de los dos sólidos realizan trabajo. Como son todas fuerzas conservativas, la energía mecánica total se conserva
y el peso de los dos sólidos realizan trabajo. Como son todas fuerzas conservativas, la energía mecánica total se conserva

Calculamos los términos de la energía mecánica. Para la barra tenemos

Para la placa, al ser D un punto fijo,
Las energías potenciales gravitatorias son, tomando como referencia y = 0,
Y la energía potencial asociada a es

Por tanto la integral primera es

La constante se determina evaluando la energía mecánica con las condiciones iniciales. Si parte del reposo y A coincidía con O tendríamos

y


