



Barra deslizando sobre apoyo vertical (Ene. 2021)
De Laplace
Contenido |
1 Enunciado

Una barra de masa m y longitud 4h (sólido "2") está articulada en un extremo (punto A) en un pasador que puede deslizar sobre el eje fijo OY1. El otro extremo de la barra se apoya en un apoyo vertical, de modo que el punto C de la barra puede deslizar sin rozamiento sobre el apoyo. Un muelle de constante elástica k y longitud natural 2h conecta el extremo A de la barra con el punto O. La gravedad actúa como se indica en la figura.
- Encuentra la reducción cinemática del movimiento {21} expresada en la base del sólido "1" y en función de las coordenadas {s,θ} y sus derivadas temporales. ¿Como es la ligadura cinemática que relaciona estas coordenadas?
- Calcula las siguientes magnitudes cinéticas del sólido "2":
 ,
,  , T, U. Expresa los resultados usando las coordenadas {s,θ} y sus derivadas temporales.
, T, U. Expresa los resultados usando las coordenadas {s,θ} y sus derivadas temporales.
- Supongamos que la función de Lagrange y el vínculo cinemático tienen esta forma ( A, B, C, D y E son constantes dadas)

Aplicando la técnica de los multiplicadores de Lagrange, encuentra las ecuaciones de movimiento.
2 Solución
2.1 Reducción cinemática
Observando el dibujo vemos que

Al ser un movimiento plano el vector rotación sólo tiene componente en el eje Z.
La barra desliza sobre el apoyo vertical en C. Esto implica que  debe ser paralela a la propia barra
debe ser paralela a la propia barra
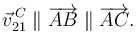
Así pues el sistema tiene un grado de libertad. Aplicamos Chasles para encontrar la expresión matemática del vínculo

Aplicamos la ligadura en C

Otra forma de llegar a esta ligadura es de forma geométrica. Observando el dibujo vemos que

Derivando respecto al tiempo obtenemos la ligadura cinemática anterior.
2.2 Cinética
Cantidad de movimiento
La velocidad del centro de masas de la barra es

Y la cantidad de movimiento es

Momento angular en el centro de masas
Como es un movimiento plano y es el centro de masas de la barra podemos usar la expresión

Energía cinética
La calculamos pasando por el centro de masas. Al ser un movimiento plano

Energía potencial
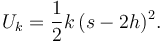
La energía potencial elástica del muelle es
La energía potencial gravitatoria es (tomando como referencia la altura del eje X1)

La energía potencial total es

2.3 Multiplicadores de Lagrange
Siguiendo el enunciado suponemos que la función de Lagrange y el vínculo cinemático son
Como hay un vínculo cinemático hay que introducir un multiplicador de Lagrange. De este modo podemos seguir trabajando con las coordenadas {s,θ}, aunque el sistema tenga sólo un grado de libertad. Las ecuaciones de Lagrange son como sigue
Ecuación para s

Ecuación para θ

Ecuación del vínculo
La tercera ecuación es el propio vínculo


