Barra con extremos sobre los ejes, Enero 2012 (G.I.C.)
De Laplace
Contenido |
1 Enunciado

Dos partículas, A y B, de masa m, están unidas por una barra rígida de longitud L y masa despreciable. La partícula A se mueve sobre el eje OX con velocidad uniforme v0, mientras que la partícula B está obligada a moverse sobre el eje OY. Si en el instante t = 0 la partícula A se encontraba en el punto O
- Encuentra la posición, velocidad y aceleración de la partícula B en función de v0 y del tiempo.
- ¿Cuál es el vector de posición y la velocidad del punto medio de la barra (C) en función de v0 y t0?
- Describe la curva que corresponde a la trayectoria del punto medio de la barra.
- ¿Que tipo de movimiento describe el punto medio de la barra? Razona tu respuesta.
2 Solución
2.1 Extremo B
El vector de posición del extremo B de la barra puede calcularse a partir de la posición del extremo A y del vector 

El vector  es el vector de posición del punto A.
El extremo A se mueve con velocidad de módulo v0 uniforme sobre el eje OX. Por tanto su velocidad es
es el vector de posición del punto A.
El extremo A se mueve con velocidad de módulo v0 uniforme sobre el eje OX. Por tanto su velocidad es

Como en el instante inicial el punto A estaba en el origen de coordenadas, su vector de posición es

El vector puede calcularse como


donde L es la longitud de la barra y θ es el ángulo de la figura. Tenemos

Por tanto el vector es

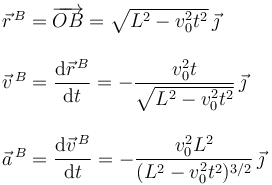
Ahora podemos expresar el vector de posición del extremo B, y derivando sucesivamente respecto del tiempo, su velocidad y aceleración
2.2 Posición y velocidad del punto medio de la barra
Podemos proceder de forma similar al apartado anterior. El vector de posición del punto medio de la barra puede construirse como

Como está en el punto medio, tenemos
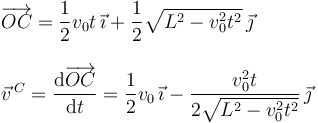
Entonces, el vector de posición del punto C y su velocidad son
2.3 Curva que describe el punto medio de la barra
Las componentes cartesianas del vector  son
son

Elevando al cuadrado ambas componentes y sumándolas tenemos

Esta expresión puede escribirse

Esta es la ecuación de una circunferencia con centro en el punto O y radio L / 2.
2.4 Tipo de movimiento del punto C
Por lo visto en el apartado anterior el movimiento es circular. Para precisar más podemos fijarnos en el módulo de la velocidad del punto C. Tenemos
La aceleración tangencial del punto C se puede calcular como
En el movimiento circular la aceleración tangencial puede calcularse como

Por tanto, el movimiento es circular con aceleración angular