Barra articulada con momento aplicado, Enero 2016 (G.I.C.)
De Laplace
Contenido |
1 Enunciado

En el sistema de la figura, la barra  (sólido "2") tiene masa m y longitud
2L. La barra está articulada en el punto fijo O de una barra vertical fija(sólido "1"). Se aplica un par
(sólido "2") tiene masa m y longitud
2L. La barra está articulada en el punto fijo O de una barra vertical fija(sólido "1"). Se aplica un par  sobre la barra "2". El sistema está sometido a la gravedad.
sobre la barra "2". El sistema está sometido a la gravedad.
- ¿Como debe ser el par aplicado para que el ángulo sea θ1 = π / 6?
- Ahora, manteniendo aplicado el par de la pregunta anterior, se apoya una barra homogénea "0", de masa m y longitud 2L, como se indica en la figura. La barra "0" se mantiene siempre horizontal. Todos los contactos son lisos.
- ¿Cuanto vale el ángulo de equilibrio en la nueva situación?
- Calcula el par vincular sobre la barra "0" originado por el vínculo en B es
2 Solución
2.1 Par para mantener el equilibrio

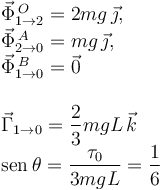
La imagen de la derecha muestra el diagrama de cuerpo libre del sólido "0". Hay una fuerza vincular en O con tres posibles componentes no nulas, pues el punto O está fijo. Las fuerzas y pares son
La suma de fuerzas debe ser cero

El momento neto respecto a O debe ser cero

El momento ejercido por el peso es

La ecuación del momento nos da la ecuación

De aquí obtenemos el valor del par

2.2 Con barra horizontal aplicada

La imagen de la derecha muestra el diagrama de cuerpo libre de ambos sólidos. Hay una fuerza vincular en O sobre el "2" con tres posibles componentes no nulas, pues el punto O está fijo. En el punto A las fuerzas vinculares forman un par de acción reacción. En el punto B hay una fuerza vincular sobre "0" para impedir un desplazamiento que no sea en la dirección del eje Y1. También hay un par vincular para que no haya rotación de la barra "0".
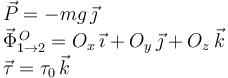
Las expresiones de fuerzas y pares sobre el sólido "2" son Las fuerzas y pares son
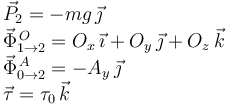
Sobre el sólido "0" tenemos
Aplicamos la condiciones de equilibrio para cada sólido. Para el sólido "2"

El momento respecto a O debe ser cero

La fuerza neta sobre el sólido "0" debe ser cero

Calculamos el momento neto respecto a B

Tenemos

Entonces

Tenemos 8 ecuaciones para 8 incógnitas, a saber {Ox,Oy,Oz,Ay,Bx,Bz,Γ,θ}. Resolviendo tenemos