



Ángulos de Euler y de navegación
De Laplace
Contenido |
1 Introducción
El movimiento general de un sólido rígido posee 6 grados de libertad.
Por el teorema de Chasles, el movimiento general de un sólido puede descomponerse en una traslación de un punto seguida de una rotación del sólido alrededor de este punto (es decir, tomándolo como fijo en la rotación). Por ello, en la parametrización del movimiento de un sólido, estos 6 grados pueden descomponerse en 3 de traslación y tres de rotación.
Como grados de libertad de traslación basta dar el desplazamiento de un punto concreto del sólido (centro de reducción).
Para la rotación, en cambio, existen diferentes formas de parametrizarla, cada una con sus ventajas e inconvenientes. Así, tenemos:
- Dar directamente la matriz de rotación que pasa de un sistema de referencia ligado al sólido a uno exterior tomado como fijo. Esta matriz tiene 9 elementos sometidos a seis vínculos, lo cual multiplica el número de ecuaciones necesarias para la descripción del movimiento.
- Dar la orientación del eje de giro mediante dos ángulos (que pueden ser coordenadas esféricas, como la latitud y la longitud) y el ángulo de giro alrededor de este eje. Tiene el inconveniente, como los ángulos de Euler y otros, que requieren un abundante uso de funciones trigonométricas.
- Emplear los denominados parámetros de Euler que son un conjunto de cuatro variables, con un vínculo, que permiten representar toda matriz de rotación. Vienen a ser la generalización a 3 dimensiones de usar x e y para dar una rotación en el plano, sujetas a la condición x2 + y2 = 1. Tienen el inconveniente de que no son fáciles de visualizar, aunque computacionalmente son muy eficientes.
- Emplear otros parámetros, como los de Cailey-Klein, que representan las rotaciones como operaciones sobre números complejos.
- Escribir la rotación general como una composición de tres rotaciones individuales sobre diferentes ejes. Esta es la técnica que se usa para definir los ángulos de Euler y los ángulos de navegación (o de Tait-Bryan). la diferencia entre los de Euler y los de Tait-Bryan es que en el primer caso se repite uno de los ejes, y en el segundo los tres ejes son diferentes. Los de Euler se emplean habitualmente al estudiar un movimiento planetario o el de un sólido con un punto fijo; los de navegación a la hora de indicar un posicionamiento de una aeronave o satélite.
2 Ángulos de Euler
Puede demostrarse que cualquier rotación de un sólido puede expresarse como la composición de tres rotaciones elementales alrededor de ejes diferentes (no necesariamente ortogonales). A su vez, estas rotaciones pueden considerarse en torno a unos ejes fijos o en torno a unos ejes intrínsecos.

- Primero efectuamos una rotación de un ángulo φ en torno a un eje del sólido 1 que nos lleva a un sólido intermedio “2”.
- A continuación rotamos un ángulo θ en torno a un eje del sólido 2, que nos lleva a un sólido intermedio “3”.
- Por último, giramos un cierto ángulo ψ en torno a un eje del sólido 3, lo que nos lleva hasta el sólido móvil 4.
La elección de qué ejes son los de rotación puede hacerse de diferentes formas. La elección que haremos aquí, que es la más habitual en el uso de los ángulos de Euler consiste en la secuencia Z1 − X2 − Z3. El que se repita uno de los ejes (aunque no sean coincidentes, por la rotación intermedia) es lo que define a esta descomposición como de ángulos de Euler. Si fueran todos diferentes (Z1 − Y2 − X3, por ejemplo) serían de Tait-Bryan, que veremos después.
Analizaremos la expresión de la posición, velocidad y aceleración en función de estos ángulos y sus derivadas temporales.
2.1 Posición y matriz de rotación
Para obtener el resultado de la rotación, debemos ver qué posición ocupa en el sistema de referencia fijo un punto perteneciente al sólido. El vector de posición se escribirá con componentes diferentes en la base fija y en la base móvil, aunque el vector sea el mismo

donde, por ser un punto del sólido las componentes (X,Y,Z) son constantes. El problema se reduce entonces a relacionar los vectores de las bases. Para ello, componemos las tres rotaciones.
2.1.1 Precesión
La primera rotación es una de un ángulo  en torno al eje OZ1 = OZ2, que nos lleva al sólido 2. La relación entre la base fija 1 y la intermedia 2 es
en torno al eje OZ1 = OZ2, que nos lleva al sólido 2. La relación entre la base fija 1 y la intermedia 2 es
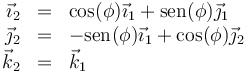
siendo su relación inversa


A esta rotación, cuando se realiza sin modificar ninguno de los otros dos ángulos, se la denomina movimiento de precesión.
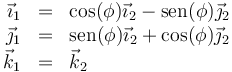
2.1.2 Nutación
La segunda rotación consiste en el giro de un ángulo θ alrededor del eje OX2 = OX3. A este eje, que no se ve modificado por la rotación, se lo denomina línea de nodos. Esta rotación nos lleva al sólido intermedio 3, cuya base se relaciona con la 2 por
siendo su relación inversa



Cuando se produce esta rotación sin que se modifiquen las otras dos se dice que el sólido efectñua un movimiento de nutación.
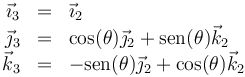
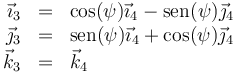
2.1.3 Rotación propia
El tercer giro (rotación propia, rotación intrínseca o simplemente rotación en el contexto del movimiento terrestre) corresponde a un nuevo giro de un ángulo ψ alrededor del ángulo OZ3 = OZ4 (que no es el mismo, normalmente, que el OZ1 = OZ2). La relación entre las bases 3 y 4 es análoga a la que hay entre la 1 y la 2.
siendo su relación inversa


El origen de los nombres precesión, nutación y rotación procede del análisis del movimiento terrestre. La rotación es el movimiento alrededor del eje terrestre. La precesión es el lento movimiento de dicho eje, que provoca que la estrella situada en el polo norte celeste vaya cambiando en el tiempo. La nutación es el cambio en la inclinación del eje terrestre, que no siempre ha estado a 23°27' como actualmente.

2.1.4 Matriz de rotación
Para pasar directamente de la base 4, ligada al sólido, a la base 1, fija, podemos hacer sustituciones sucesivas, aunque los cálculos se vuelven rápidamente engorrosos. La matrix de rotación está formada por los productos escalares entre ambas bases
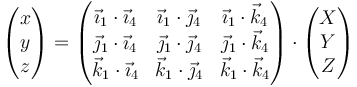
siendo el camino más corto para hallar cada elemento no el pasar de la base 4 a la 1 directamente, sino ayudarnos de las bases intermedias. Así para el elemento R11 tenemos

y, dado que,

queda finalmente

y análogamente para el resto de elementos. El más simple es

A estos resultados también se puede llegar multiplicando matrices, pero vamos a intentar aprovechar al máximo la cinemática del movimiento relativo.
2.2 Velocidad angular y velocidad lineal
2.2.1 Velocidad angular
Cada uno de los movimientos relativos posee su propia velocidad angular, correspondiente a la variación del ángulo correspondiente
La velocidad angular de cada sistema respecto al anterior será
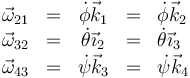
La velocidad angular del sólido respecto al sistema fijo será la del sistema referencia 4 respecto al 1.

Si necesitamos expresar la velocidad angular en una única base, podemos hacerlo proyectando sobre ella o, equivalentemente, sustituyendo sucesivamente los vectores de la base.
Así, en el sistema 4, ligado al sólido

donde el último producto escalar se hace más fácilmente pasando ambos vectores a la base intermedia

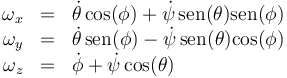
y queda finalmente, para las tres componentes en la base ligada al sólido
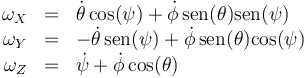
y en la base fija 1
En muchas ocasiones, nos interesa expresar la velocidad angular ni en la base 1 ni en la base 4, sino en una de las intermedias. Esto es especialmente útil en casos de sólidos con simetría de revolución.

