



Diadas y productos diádicos
De Laplace
| Línea 13: | Línea 13: | ||
A_zB_x &A_zB_y & A_zB_z\end{matrix}\right)</math></center> | A_zB_x &A_zB_y & A_zB_z\end{matrix}\right)</math></center> | ||
| - | El producto diádico se indica sin punto, <math>\vec{A}\vec{B}</math>. También se representa | + | El producto diádico se indica sin punto, <math>\vec{A}\vec{B}</math>. También se representa con el símbolo de producto tensorial como <math>\vec{A}\otimes\vec{B}</math>. Al ente que forma se denomina ''diada''. |
| - | con el símbolo de producto tensorial como <math>\vec{A}\otimes\vec{B}</math>. Al ente | + | |
| - | que forma se denomina ''diada''. | + | |
Esta matriz puede obtenerse a partir de la representación de cada vector como una matriz fila o columna, ya que | Esta matriz puede obtenerse a partir de la representación de cada vector como una matriz fila o columna, ya que | ||
| Línea 29: | Línea 27: | ||
</math></center> | </math></center> | ||
| - | Debe recalcarse que la matriz es la representación del tensor, pero no | + | Debe recalcarse que la matriz es la representación del tensor, pero no ''es'' el tensor, del mismo modo que un vector no son sus tres componentes, ya que éstas pueden cambiar en una transformación de coordenadas o en un cambio de ejes, aunque el vector siga siendo el mismo. |
| - | ''es'' el tensor, del mismo modo que un vector no son sus tres | + | ==Propiedades del producto diádico== |
| - | componentes, ya que éstas pueden cambiar en una transformación de | + | ===Linealidad=== |
| - | coordenadas o en un cambio de ejes, aunque el vector siga siendo el mismo. | + | El producto diádico, así definido, es lineal respecto a los dos vectores que lo forman, esto es |
| - | ==Propiedades del producto diádico | + | |
| - | + | ||
| - | El producto diádico, así definido, es lineal respecto a los dos vectores que | + | |
| - | lo forman, esto es | + | |
<center><math> | <center><math> | ||
| - | \vec{A}(\lambda\vec{B}+\mu\ | + | \vec{A}(\lambda\vec{B}+\mu\vec{C})=\lambda \vec{A}\vec{B}+\mu\vec{A}\bC |
</math></center><center><math> | </math></center><center><math> | ||
| - | (\lambda\vec{A}+\mu\ | + | (\lambda\vec{A}+\mu\vec{C})\vec{B}=\lambda \vec{A}\vec{B}+\mu\vec{C}\vec{B} |
</math></center> | </math></center> | ||
| - | Esta propiedad no es exclusiva de este producto. También el producto escalar | + | Esta propiedad no es exclusiva de este producto. También el producto escalar y el vectorial la satisfacen. |
| - | y el vectorial la satisfacen. | + | ===Simetría o antisimetría=== |
| - | + | A diferencia del producto escalar, que es conmutativo, y del vectorial, que es anticonmutativo, el producto diádico no será, en general, ni una cosa ni la otra. Es facil ver por qué: el producto <math>A_xB_y</math> no tiene por que coincidir con <math>A_yB_x</math>. Así pues | |
| - | A diferencia del producto escalar, que es conmutativo, y del vectorial, que | + | |
| - | es anticonmutativo, el producto diádico no será, en general, ni una cosa ni | + | |
| - | la otra. Es facil ver por qué: el producto | + | |
| - | coincidir con | + | |
<center><math> | <center><math> | ||
\vec{A}\vec{B}\neq\vec{B}\vec{A} | \vec{A}\vec{B}\neq\vec{B}\vec{A} | ||
</math></center> | </math></center> | ||
| - | + | ===Traza=== | |
| - | La traza del producto diádico se define como la suma de los elementos | + | La traza del producto diádico se define como la suma de los elementos diagonales. Se deduce entonces que |
| - | diagonales. Se deduce entonces que | + | <center></math> |
| - | <center><math> | + | |
\mathrm{Tr}(\vec{A}\vec{B})=A_xB_x+A_yB_y+A_zB_z=\vec{A}\cdot\vec{B} | \mathrm{Tr}(\vec{A}\vec{B})=A_xB_x+A_yB_y+A_zB_z=\vec{A}\cdot\vec{B} | ||
</math></center> | </math></center> | ||
| - | + | ===Producto escalar de una diada por un vector=== | |
| - | Puede multiplicarse escalarmente una diada por otro vector análogamente a | + | Puede multiplicarse escalarmente una diada por otro vector análogamente a como una matriz <math>3\times3</math> se multiplica por un vector columna. Resulta entonces |
| - | como una matriz | + | |
| - | entonces | + | |
<center><math> | <center><math> | ||
| - | (\vec{A}\vec{B})\cdot\ | + | (\vec{A}\vec{B})\cdot\vec{C}=\vec{A}(\vec{B}\cdot\vec{C}) |
</math></center> | </math></center> | ||
| - | Nótese el diferente | + | Nótese el diferente carácter de los términos de esta expresión. En el primer miembro tenemos el producto de un tensor por un vector; en el segundo, el de un vector por un escalar. Nótese tambien la posición del punto. |
| - | miembro tenemos el producto de un tensor por un vector; en el segundo, el de | + | |
| - | un vector por un escalar. Nótese tambien la posición del punto. | + | |
| - | Tenemos pues que el producto de una diada por un vector da otro vector que, | + | Tenemos pues que el producto de una diada por un vector da otro vector que, en general, tendrá una dirección y un módulo diferente al original. De hecho, esta definición permite definir las diadas en una forma abstracta, independiente del sistema de coordenadas elegido, en forma de un |
| - | en general, tendrá una dirección y un módulo diferente al original. De | + | ''operador vectorial''. |
| - | hecho, esta definición permite definir las diadas en una forma abstracta, | + | |
| - | independiente del sistema de coordenadas elegido, en forma de un | + | |
| - | ''operador vectorial | + | |
| - | + | ===Otros productos=== | |
| - | Igualmente se puede multiplicar un vector escalarmente ''por la derecha | + | Igualmente se puede multiplicar un vector escalarmente ''por la derecha'' |
<center><math> | <center><math> | ||
| - | \ | + | \vec{C}\cdot(\vec{A}\vec{B})\equiv (\bC\cdot\vec{A})\vec{B} |
</math></center> | </math></center> | ||
| - | (obsérvese que el resultado cambia según el lado por el que se | + | (obsérvese que el resultado cambia según el lado por el que se multiplique). |
| - | multiplique). También se puede multiplicar simultaneamente por ambos lados. | + | |
| - | En este caso, el resultado es un número. | + | También se puede multiplicar simultaneamente por ambos lados. En este caso, el resultado es un número. |
<center><math> | <center><math> | ||
| - | \ | + | \vec{C}\cdot(\vec{A}\vec{B})\cdot\bD=(\bC\cdot\vec{A})(\vec{B}\cdot\bD) |
</math></center> | </math></center> | ||
Asimismo se puede multiplicar vectorialmente | Asimismo se puede multiplicar vectorialmente | ||
<center><math> | <center><math> | ||
| - | (\vec{A}\vec{B})\times\ | + | (\vec{A}\vec{B})\times\vec{C}=\vec{A}(\vec{B}\times\vec{C}) |
</math></center> | </math></center> | ||
| - | en este caso, el resultado es otra diada. En general, todos los productos | + | en este caso, el resultado es otra diada. En general, todos los productos definidos sobre vectores son generalizables a diadas. |
| - | definidos sobre vectores son generalizables a diadas. | + | |
| - | ==Base de las diadas | + | ==Base de las diadas== |
De la propiedad de linealidad resulta de forma inmediata que | De la propiedad de linealidad resulta de forma inmediata que | ||
<center><math> | <center><math> | ||
| Línea 100: | Línea 81: | ||
\sum_{i,j}A_iB_j\bu{i}\bu{j} | \sum_{i,j}A_iB_j\bu{i}\bu{j} | ||
</math></center> | </math></center> | ||
| - | por lo que, conocidos los productos diádicos de los vectores de la base, | + | por lo que, conocidos los productos diádicos de los vectores de la base, podemos expresar cualquier diada en función de ellos. Por su parte, se tiene que, por ejemplo, |
| - | podemos expresar cualquier diada en función de ellos. Por su parte, se tiene | + | |
| - | que, por ejemplo, | + | |
<center><math> | <center><math> | ||
| - | \ | + | \vec{\imath}\vec{\jmath}=\left(\begin{matrix}0 & 1 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \end{matrix}\right) |
</math></center> | </math></center> | ||
En general, el producto de dos vectores unitarios en cartesianas puede | En general, el producto de dos vectores unitarios en cartesianas puede | ||
| Línea 119: | Línea 98: | ||
\mathcal{M}=\sum_{ij}M_{ij}\bu{i}\bu{j} | \mathcal{M}=\sum_{ij}M_{ij}\bu{i}\bu{j} | ||
</math></center> | </math></center> | ||
| - | donde los | + | donde los <math>M_{ij}</math> son los elementos de la matriz que representa al tensor |
en coordenadas cartesianas. | en coordenadas cartesianas. | ||
| Línea 125: | Línea 104: | ||
expresarse asimismo en su forma diádica. | expresarse asimismo en su forma diádica. | ||
| - | + | ===Tensor unidad (o identidad)} | |
Un tensor especialmente importante es el unitario, que se caracteriza por | Un tensor especialmente importante es el unitario, que se caracteriza por | ||
que todos los elementos de la diagonal valen la unidad y el resto son nulos. | que todos los elementos de la diagonal valen la unidad y el resto son nulos. | ||
Se sigue que | Se sigue que | ||
<center><math> | <center><math> | ||
| - | \mathcal{I}=\ | + | \mathcal{I}=\vec{\imath}\vec{\imath}+\vec{\jmath}\vec{\jmath}+\vec{k}\vec{k} |
</math></center> | </math></center> | ||
Puede comprobarse que se trata del tensor identidad viendo como actúa sobre | Puede comprobarse que se trata del tensor identidad viendo como actúa sobre | ||
un vector arbitario | un vector arbitario | ||
<center><math> | <center><math> | ||
| - | \mathcal{I}\cdot\vec{A}=(\ | + | \mathcal{I}\cdot\vec{A}=(\vec{\imath}\vec{\imath}+\vec{\jmath}\vec{\jmath}+\vec{k}\vec{k})\cdot |
| - | \vec{A}=\ | + | \vec{A}=\vec{\imath}(\vec{\imath}\cdot\vec{A})+\vec{\jmath}(\vec{\jmath}\cdot\vec{A})+\vec{k}(\vec{k}\cdot\vec{A})=</math></center><center><math> |
| - | =\ | + | =\vec{\imath}A_x+\vec{\jmath}A_y+\vec{k}A_z=\vec{A} |
</math></center> | </math></center> | ||
==Cambios de base} | ==Cambios de base} | ||
| Línea 148: | Línea 127: | ||
Consideremos, por ejemplo, la diada | Consideremos, por ejemplo, la diada | ||
<center><math> | <center><math> | ||
| - | \mathcal{M}=\br\ | + | \mathcal{M}=\br\vec{r}=x^2\vec{\imath}\vec{\imath}+xy(\vec{\imath}\vec{\jmath}+\vec{\jmath}\vec{\imath})+\cdots+ |
| - | z^2\ | + | z^2\vec{k}\vec{k} |
</math></center> | </math></center> | ||
Tanto esta expresión como la matricial tienen nueve componentes no nulas. | Tanto esta expresión como la matricial tienen nueve componentes no nulas. | ||
Sin embargo, si empleamos coordenadas esféricas queda | Sin embargo, si empleamos coordenadas esféricas queda | ||
<center><math> | <center><math> | ||
| - | \mathcal{M}=\br\ | + | \mathcal{M}=\br\vec{r}=r^2\bu{r}\bu{r} |
</math></center> | </math></center> | ||
esto es, sólo una componente es no nula y, por tratarse del mismo tensor | esto es, sólo una componente es no nula y, por tratarse del mismo tensor | ||
| Línea 175: | Línea 154: | ||
Por ejemplo | Por ejemplo | ||
<center><math> | <center><math> | ||
| - | \bu{r}\bu{r}=(\sa\bu{\rho}+\ca\ | + | \bu{r}\bu{r}=(\sa\bu{\rho}+\ca\vec{k})(\sa\bu{\rho}+\ca\vec{k})=</math></center><center><math>= |
| - | \sen^2\theta\bu{\rho}\bu{\rho}+\sa\ca(\bu{\rho}\ | + | \sen^2\theta\bu{\rho}\bu{\rho}+\sa\ca(\bu{\rho}\vec{k}+\vec{k}\bu{\rho})+ |
| - | \cos^2\theta\ | + | \cos^2\theta\vec{k}\vec{k} |
</math></center> | </math></center> | ||
Es posible también construir una base del espacio de los tensores combinando | Es posible también construir una base del espacio de los tensores combinando | ||
dos bases vectoriales diferentes (por ejemplo, construyendo los productos | dos bases vectoriales diferentes (por ejemplo, construyendo los productos | ||
| - | + | <math>\vec{\imath}\bu{r}</math>, <math>\vec{\jmath}\bu{\theta}</math> y similares), pero no suele ser de mucha | |
utilidad. | utilidad. | ||
| Línea 188: | Línea 167: | ||
A semejanza de lo que ocurre en el caso escalar y vectorial, es posible | A semejanza de lo que ocurre en el caso escalar y vectorial, es posible | ||
desarrollar el cálculo del operador nabla para diadas. | desarrollar el cálculo del operador nabla para diadas. | ||
| - | + | ===Gradiente de un vector} | |
Del mismo modo que el producto escalar y vectorial de nabla por un vector | Del mismo modo que el producto escalar y vectorial de nabla por un vector | ||
generaban la divergencia y el rotacional, respectivamente, el producto | generaban la divergencia y el rotacional, respectivamente, el producto | ||
| Línea 205: | Línea 184: | ||
en cuenta las derivadas de los vectores unitarios. | en cuenta las derivadas de los vectores unitarios. | ||
| - | Si el vector | + | Si el vector <math>\vec{A}</math> es el de posición <math>\br</math> resulta |
<center><math> | <center><math> | ||
| - | \nabla\ | + | \nabla\vec{r}=\left(\vec{\imath}\dpar{}{x}+\vec{\jmath}\dpar{}{y}+\vec{k}\dpar{}{z}\right) |
| - | (x\ | + | (x\vec{\imath}+y\vec{\jmath}+z\vec{k})=</math></center><center><math>= |
| - | \ | + | \vec{\imath}\vec{\imath}+\vec{\jmath}\vec{\jmath}+\vec{k}\vec{k}=\mathcal{I} |
</math></center> | </math></center> | ||
esto es, el gradiente del vector de posición es el tensor identidad. Resulta | esto es, el gradiente del vector de posición es el tensor identidad. Resulta | ||
entonces la siguiente relación | entonces la siguiente relación | ||
<center><math> | <center><math> | ||
| - | (\vec{A}\cdot\nabla)\br=\vec{A}\cdot(\nabla\ | + | (\vec{A}\cdot\nabla)\br=\vec{A}\cdot(\nabla\vec{r})=\vec{A}\cdot\mathcal{I}=\vec{A} |
</math></center> | </math></center> | ||
| - | + | ===Divergencia de un tensor} | |
La divergencia de un tensor se define como el producto escalar del operador | La divergencia de un tensor se define como el producto escalar del operador | ||
nabla por el tensor en cuestión. Resulta entonces que son posibles | nabla por el tensor en cuestión. Resulta entonces que son posibles | ||
| Línea 229: | Línea 208: | ||
</math></center> | </math></center> | ||
| - | + | ===Otros operadores diferenciales} | |
Igualmente se pueden definir el rotacional de un tensor y de una diada (por | Igualmente se pueden definir el rotacional de un tensor y de una diada (por | ||
la derecha o por la izquierda) | la derecha o por la izquierda) | ||
| Línea 267: | Línea 246: | ||
mecánica y dos de electromagnetismo. | mecánica y dos de electromagnetismo. | ||
| - | + | ===Tensor de inercia} | |
Cuando se estudia el sólido rígido, se introduce el tensor de inercia | Cuando se estudia el sólido rígido, se introduce el tensor de inercia | ||
| - | + | <math>\mathcal{J}</math> que, para un punto material, es una matriz con componentes | |
<center><math> | <center><math> | ||
(\mathcal{J})=m\left(\begin{matrix}y^2+z^2 & -xy & -xz \\ | (\mathcal{J})=m\left(\begin{matrix}y^2+z^2 & -xy & -xz \\ | ||
| Línea 277: | Línea 256: | ||
En forma diádica este tensor se escribe simplemente como | En forma diádica este tensor se escribe simplemente como | ||
<center><math> | <center><math> | ||
| - | \mathcal{J}=m(r^2\mathcal{I}-\br\ | + | \mathcal{J}=m(r^2\mathcal{I}-\br\vec{r}) |
</math></center> | </math></center> | ||
Usando la expresión diádica podemos obtener, por ejemplo, el valor del | Usando la expresión diádica podemos obtener, por ejemplo, el valor del | ||
momento angular | momento angular | ||
<center><math> | <center><math> | ||
| - | \mathbf{L}=\mathcal{J}\cdot\frec=m(r^2\mathcal{I}\cdot\frec-(\br\ | + | \mathbf{L}=\mathcal{J}\cdot\frec=m(r^2\mathcal{I}\cdot\frec-(\br\vec{r})\cdot\frec)=</math></center><center><math> |
| - | m(r^2\frec-\br(\br\cdot\frec))=m\ | + | m(r^2\frec-\br(\br\cdot\frec))=m\vec{r}\times(\frec\times\vec{r}) |
</math></center> | </math></center> | ||
| Línea 289: | Línea 268: | ||
tendremos que | tendremos que | ||
<center><math> | <center><math> | ||
| - | \mathcal{J}=\int \rho (r^2\mathcal{I}-\br\ | + | \mathcal{J}=\int \rho (r^2\mathcal{I}-\br\vec{r})\,d\tau |
</math></center> | </math></center> | ||
| Línea 300: | Línea 279: | ||
</math></center> | </math></center> | ||
| - | + | ===Momento cuadrupolar} | |
Cuando se hace el desarrollo multipolar para calcular el potencial eléctrico | Cuando se hace el desarrollo multipolar para calcular el potencial eléctrico | ||
creado por una distribución de carga en puntos alejados de la misma se | creado por una distribución de carga en puntos alejados de la misma se | ||
obtiene que | obtiene que | ||
<center><math> | <center><math> | ||
| - | \phi=\kd\left(\frac{q}{r}+\frac{\bp\cdot\ | + | \phi=\kd\left(\frac{q}{r}+\frac{\bp\cdot\vec{r}}{r^3}+ |
| - | \frac{\br\cdot\mathcal{Q}\cdot\ | + | \frac{\br\cdot\mathcal{Q}\cdot\vec{r}}{r^5}+\cdots\right) |
</math></center> | </math></center> | ||
Los distintos coeficientes son los llamados momentos multipolares. el | Los distintos coeficientes son los llamados momentos multipolares. el | ||
| Línea 318: | Línea 297: | ||
el momento cuadrupolar se escribe | el momento cuadrupolar se escribe | ||
<center><math> | <center><math> | ||
| - | \mathcal{Q}=q\frac{3\ | + | \mathcal{Q}=q\frac{3\vec{r}\br-r^2\mathcal{I}}{2} |
</math></center> | </math></center> | ||
| - | Si tenemos, por ejemplo, una carga puntual situada en | + | Si tenemos, por ejemplo, una carga puntual situada en <math>a\vec{k}</math> tendremos |
que su momento cuadrupolar respecto al origen es | que su momento cuadrupolar respecto al origen es | ||
<center><math> | <center><math> | ||
| - | \mathcal{Q}=qa^2\frac{3\ | + | \mathcal{Q}=qa^2\frac{3\vec{k}\vec{k}-\vec{\imath}\vec{\imath}-\vec{\jmath}\vec{\jmath}-\vec{k}\vec{k}}{2}=</math></center> |
<center><math> | <center><math> | ||
| - | =qa^2\frac{-\ | + | =qa^2\frac{-\vec{\imath}\vec{\imath}-\vec{\jmath}\vec{\jmath}+2\vec{k}\vec{k}}{2} |
</math></center> | </math></center> | ||
los que nos da, directamente, las nueve componentes de la matriz | los que nos da, directamente, las nueve componentes de la matriz | ||
| Línea 340: | Línea 319: | ||
\phi_c=\frac{qa^2}{8\pi\eps | \phi_c=\frac{qa^2}{8\pi\eps | ||
r^5} | r^5} | ||
| - | \left(\br\cdot(-\ | + | \left(\br\cdot(-\vec{\imath}\vec{\imath}-\vec{\jmath}\vec{\jmath}+2\vec{k}\vec{k})\cdot\vec{r}\right)= |
\frac{qa^2(2z^2-x^2-y^2)}{8\pi\eps | \frac{qa^2(2z^2-x^2-y^2)}{8\pi\eps | ||
r^5} | r^5} | ||
</math></center> | </math></center> | ||
| - | + | ===Tensor de tensiones de Maxwell} | |
En situaciones electrostáticas, es posible calcular la fuerza sobre un | En situaciones electrostáticas, es posible calcular la fuerza sobre un | ||
sistema directamente a partir del campo (sin conocer la densidad de carga | sistema directamente a partir del campo (sin conocer la densidad de carga | ||
| Línea 384: | Línea 363: | ||
de un producto tensorial, extensible a cualquier orden y cualquier métrica. | de un producto tensorial, extensible a cualquier orden y cualquier métrica. | ||
No existe problema en definir el producto diádico de tres vectores | No existe problema en definir el producto diádico de tres vectores | ||
| - | + | <math>\vec{A}\vec{B}\bC</math> que sería un tensor de tercer orden, imposible de representar | |
por una matriz. | por una matriz. | ||
También es posible tratar las diadas como un caso particular de aplicación | También es posible tratar las diadas como un caso particular de aplicación | ||
| Línea 398: | Línea 377: | ||
\item | \item | ||
<center><math> | <center><math> | ||
| - | \vec{A}\vec{B} \qquad \mathrm{con}\qquad \vec{A}=\ | + | \vec{A}\vec{B} \qquad \mathrm{con}\qquad \vec{A}=\vec{\imath}+\vec{\jmath}-2\vec{k}\qquad |
| - | \vec{B}=\ | + | \vec{B}=\vec{\imath}-\vec{k} |
</math></center> | </math></center> | ||
\item | \item | ||
| Línea 407: | Línea 386: | ||
\item | \item | ||
<center><math> | <center><math> | ||
| - | \bu{\theta}\ | + | \bu{\theta}\vec{k} |
</math></center> | </math></center> | ||
\end{enumerate} | \end{enumerate} | ||
\item Es fácil ver que el conjunto de las diadas no forma un espacio | \item Es fácil ver que el conjunto de las diadas no forma un espacio | ||
| - | vectorial, ya que la suma de dos diadas, | + | vectorial, ya que la suma de dos diadas, <math>\vec{A}\vec{B}+\bC\bD</math>, no será, en |
general, otra diada. ¨Cuál es la condición o condiciones para que sí | general, otra diada. ¨Cuál es la condición o condiciones para que sí | ||
se de esta relación? | se de esta relación? | ||
| Línea 420: | Línea 399: | ||
(\vec{A}\vec{B})\cdot\mathbf{x}=\lambda\mathbf{x} | (\vec{A}\vec{B})\cdot\mathbf{x}=\lambda\mathbf{x} | ||
</math></center> | </math></center> | ||
| - | hallar los valores posibles de | + | hallar los valores posibles de <math>\lambda</math> y <math>\mathbf{x}</math>. |
\item Repetir el problema anterior para el cálculo de los llamados | \item Repetir el problema anterior para el cálculo de los llamados | ||
''autovectores por la izquierda}, definidos como los | ''autovectores por la izquierda}, definidos como los | ||
| - | + | <math>\mathbf{x}</math> tales que | |
<center><math> | <center><math> | ||
\mathbf{x}\cdot(\vec{A}\vec{B})=\lambda\mathbf{x} | \mathbf{x}\cdot(\vec{A}\vec{B})=\lambda\mathbf{x} | ||
| Línea 438: | Línea 417: | ||
\vec{A}\vec{B}=\mathcal{S}+\mathcal{A} | \vec{A}\vec{B}=\mathcal{S}+\mathcal{A} | ||
</math></center> | </math></center> | ||
| - | Hallar | + | Hallar <math>\mathcal{S}</math> y <math>\mathcal{A}</math> (sugerencia: hallar la |
traspuesta de la expresión anterior). | traspuesta de la expresión anterior). | ||
\item En el cálculo anterior, ¨qué representan las componentes del | \item En el cálculo anterior, ¨qué representan las componentes del | ||
| - | tensor antisimétrico | + | tensor antisimétrico <math>\mathcal{A}</math>? |
\item ¨Cuál es la condición para que una diada sea simétrica | \item ¨Cuál es la condición para que una diada sea simétrica | ||
| - | ( | + | (<math>\vec{A}\vec{B}=\vec{B}\vec{A}</math>)? ¨Y para que sea antisimétrica (<math>\vec{A}\vec{B}=-\vec{B}\vec{A}</math>)? |
\item A partir de la base cartesiana de las diadas, hallar una base | \item A partir de la base cartesiana de las diadas, hallar una base | ||
del subespacio de tensores simétricos y del de tensores | del subespacio de tensores simétricos y del de tensores | ||
| Línea 450: | Línea 429: | ||
\item Demostrar que todo tensor se puede escribir como | \item Demostrar que todo tensor se puede escribir como | ||
<center><math> | <center><math> | ||
| - | \mathcal{M}=\vec{A}\ | + | \mathcal{M}=\vec{A}\vec{\imath}+\vec{B}\vec{\jmath}+\bC\vec{k} |
</math></center> | </math></center> | ||
| - | ¨Cuánto valen | + | ¨Cuánto valen <math>\vec{A}</math>, <math>\vec{B}</math> y <math>\bC</math>? Esto permite considerar los |
tensores como vectores de vectores y muestra que todo tensor puede | tensores como vectores de vectores y muestra que todo tensor puede | ||
ponerse como combinación de sólo tres diadas. | ponerse como combinación de sólo tres diadas. | ||
| - | \item Expresar el tensor | + | \item Expresar el tensor <math>\br\vec{r}-r^2\mathcal{I}</math> en coordenadas |
cilíndricas. | cilíndricas. | ||
\item Hallar las componentes cartesianas del tensor | \item Hallar las componentes cartesianas del tensor | ||
| - | + | <math>\mathcal{I}\times\vec{A}</math>. | |
\item Obtener las componentes del gradiente de un vector en | \item Obtener las componentes del gradiente de un vector en | ||
coordenadas cilíndricas. Recuérdese que | coordenadas cilíndricas. Recuérdese que | ||
| Línea 465: | Línea 444: | ||
</math></center> | </math></center> | ||
y todas las demas derivadas son nulas. | y todas las demas derivadas son nulas. | ||
| - | \item Hallar la divergencia y el rotacional del tensor | + | \item Hallar la divergencia y el rotacional del tensor <math>\vec{A}\br</math>, con |
| - | + | <math>\vec{A}</math> un vector constante. | |
| - | \item Hallar el gradiente del campo vectorial | + | \item Hallar el gradiente del campo vectorial <math>\vec{A}=r^n\bu{r}</math> y del |
| - | + | <math>\vec{B}=\rho^n\bu{\rho}</math>. | |
\item Demostrar que si un tensor es el gradiente de un vector, su | \item Demostrar que si un tensor es el gradiente de un vector, su | ||
rotacional es nulo. | rotacional es nulo. | ||
\item Hallar el tensor de inercia de una varilla homogénea de | \item Hallar el tensor de inercia de una varilla homogénea de | ||
| - | longitud | + | longitud <math>L</math>, colocada a lo largo del eje <math>z</math> y con centro en el |
origen de coordenadas. | origen de coordenadas. | ||
| - | \item Hallar el momento cuadrupolar de un anillo de radio | + | \item Hallar el momento cuadrupolar de un anillo de radio <math>R</math> con |
| - | densidad de carga | + | densidad de carga <math>\lambda</math> situado en el plano <math>xy</math> con centro el |
origen de coordenadas. | origen de coordenadas. | ||
\item Determinar, empleando el tensor de tensiones de Maxwell, que | \item Determinar, empleando el tensor de tensiones de Maxwell, que | ||
Revisión de 10:22 13 abr 2018
Contenido |
1 Introducción
Lo que sigue es una introducción, bastante poco rigurosa, del concepto de producto diádico y sus posibles aplicaciones al cálculo tensorial. Al final figuran una serie de problemas de aplicación de esta técnica.
2 Definición de producto diádico
En el espacio tridimensional ordinario se suelen emplear dos productos entre vectores, el escalar,  , y el vectorial,
, y el vectorial,  .
Como su propio nombre indica, el primero es un escalar (esto es, un número), mientras que el segundo es un vector (rigurosamente hablando, es un seudovector).
.
Como su propio nombre indica, el primero es un escalar (esto es, un número), mientras que el segundo es un vector (rigurosamente hablando, es un seudovector).
Es posible definir un tercer producto que tiene carácter tensorial. Este producto diádico (o tensorial) puede representarse en coordenadas cartesianas por una matriz 3×3 cuyos elementos son los productos de las respectivas componentes
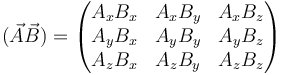
El producto diádico se indica sin punto,  . También se representa con el símbolo de producto tensorial como
. También se representa con el símbolo de producto tensorial como  . Al ente que forma se denomina diada.
. Al ente que forma se denomina diada.
Esta matriz puede obtenerse a partir de la representación de cada vector como una matriz fila o columna, ya que

Puede compararse con el producto escalar, que es

Debe recalcarse que la matriz es la representación del tensor, pero no es el tensor, del mismo modo que un vector no son sus tres componentes, ya que éstas pueden cambiar en una transformación de coordenadas o en un cambio de ejes, aunque el vector siga siendo el mismo.
3 Propiedades del producto diádico
3.1 Linealidad
El producto diádico, así definido, es lineal respecto a los dos vectores que lo forman, esto es

Esta propiedad no es exclusiva de este producto. También el producto escalar y el vectorial la satisfacen.
3.2 Simetría o antisimetría
A diferencia del producto escalar, que es conmutativo, y del vectorial, que es anticonmutativo, el producto diádico no será, en general, ni una cosa ni la otra. Es facil ver por qué: el producto AxBy no tiene por que coincidir con AyBx. Así pues

3.3 Traza
La traza del producto diádico se define como la suma de los elementos diagonales. Se deduce entonces que
\mathrm{Tr}(\vec{A}\vec{B})=A_xB_x+A_yB_y+A_zB_z=\vec{A}\cdot\vec{B}
</math>3.4 Producto escalar de una diada por un vector
Puede multiplicarse escalarmente una diada por otro vector análogamente a como una matriz  se multiplica por un vector columna. Resulta entonces
se multiplica por un vector columna. Resulta entonces

Nótese el diferente carácter de los términos de esta expresión. En el primer miembro tenemos el producto de un tensor por un vector; en el segundo, el de un vector por un escalar. Nótese tambien la posición del punto.
Tenemos pues que el producto de una diada por un vector da otro vector que, en general, tendrá una dirección y un módulo diferente al original. De hecho, esta definición permite definir las diadas en una forma abstracta, independiente del sistema de coordenadas elegido, en forma de un operador vectorial.
3.5 Otros productos
Igualmente se puede multiplicar un vector escalarmente por la derecha
(obsérvese que el resultado cambia según el lado por el que se multiplique).
También se puede multiplicar simultaneamente por ambos lados. En este caso, el resultado es un número.
Asimismo se puede multiplicar vectorialmente

en este caso, el resultado es otra diada. En general, todos los productos definidos sobre vectores son generalizables a diadas.
4 Base de las diadas
De la propiedad de linealidad resulta de forma inmediata que
por lo que, conocidos los productos diádicos de los vectores de la base, podemos expresar cualquier diada en función de ellos. Por su parte, se tiene que, por ejemplo,
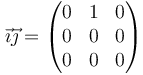
En general, el producto de dos vectores unitarios en cartesianas puede representarse, en forma matricial, como una matriz con un elemento unitario y los demás nulos. Por ello, podemos concluir que los productos diádicos de los vectores unitarios forman un sistema generador del conjunto de las diadas. ==Tensores cartesianos} Partiendo de la analogía tensor/matriz puede extenderse lo dicho a todos los tensores, esto es, cualquier tensor puede expresarse como combinación lineal de diadas unitarias}. En forma algebraica
donde los Mij son los elementos de la matriz que representa al tensor en coordenadas cartesianas.
Es inmediato que las definiciones y propiedades del álgebra matricial pueden expresarse asimismo en su forma diádica.
===Tensor unidad (o identidad)} Un tensor especialmente importante es el unitario, que se caracteriza por que todos los elementos de la diagonal valen la unidad y el resto son nulos. Se sigue que

Puede comprobarse que se trata del tensor identidad viendo como actúa sobre un vector arbitario


==Cambios de base} Con lo dicho hasta ahora no se evidencia ninguna ventaja de la expresión diádica de un tensor sobre la expresión matricial. stas aparecen cuando se considera que mientras que la última es válida sólo en coordenadas cartesianas, la primera es manejable tanto en su forma abstracta como en cualquier sistema.
Consideremos, por ejemplo, la diada
Tanto esta expresión como la matricial tienen nueve componentes no nulas. Sin embargo, si empleamos coordenadas esféricas queda
esto es, sólo una componente es no nula y, por tratarse del mismo tensor (que, recordemos, es independiente del sistema de coordenadas) es mucho más fácil trabajar con esta expresión.
Hay que remarcar que, cuando se usan coordenadas no cartesianas, la expresión matricial del tensor carece de utilidad (en cuanto que no se va a comportar como lo hacen las matrices ``normales).
En particular la expresión del tensor identidad en cualquier base ortogonal es
Para realizar el cambio de un sistema de coordenadas a otro las reglas de transformación son análogas a las que se aplican entre vectores, sólo hay que aplicarlas a cada uno de los vectores unitarios que componen las diadas. Por ejemplo
Es posible también construir una base del espacio de los tensores combinando dos bases vectoriales diferentes (por ejemplo, construyendo los productos No se pudo entender (Falta el ejecutable de <strong>texvc</strong>. Por favor, lea <em>math/README</em> para configurarlo.): \vec{\imath}\bu{r} , No se pudo entender (Falta el ejecutable de <strong>texvc</strong>. Por favor, lea <em>math/README</em> para configurarlo.): \vec{\jmath}\bu{\theta}
y similares), pero no suele ser de mucha
utilidad.
==Cálculo diferencial con diadas} A semejanza de lo que ocurre en el caso escalar y vectorial, es posible desarrollar el cálculo del operador nabla para diadas. ===Gradiente de un vector} Del mismo modo que el producto escalar y vectorial de nabla por un vector generaban la divergencia y el rotacional, respectivamente, el producto diádico produce un tensor, conocido como el gradiente del vector}. En coordenadas cartesianas, la expresión de éste es
Si se emplean coordenadas diferentes de las cartesianas es importante tener en cuenta las derivadas de los vectores unitarios.
Si el vector  es el de posición No se pudo entender (Falta el ejecutable de <strong>texvc</strong>. Por favor, lea <em>math/README</em> para configurarlo.): \br
es el de posición No se pudo entender (Falta el ejecutable de <strong>texvc</strong>. Por favor, lea <em>math/README</em> para configurarlo.): \br
resulta

esto es, el gradiente del vector de posición es el tensor identidad. Resulta entonces la siguiente relación
===Divergencia de un tensor} La divergencia de un tensor se define como el producto escalar del operador nabla por el tensor en cuestión. Resulta entonces que son posibles dos} divergencias, según que el producto se haga por la derecha o por la izquierda.
La divergencia de una diada es

===Otros operadores diferenciales} Igualmente se pueden definir el rotacional de un tensor y de una diada (por la derecha o por la izquierda)

o el gradiente del gradiente de un escalar

que es un tensor; el gradiente de un rotacional de un vector, etc.
==Teoremas integrales} Los teoremas de Stokes y de Gauss pueden generalizarse a tensores por simple sustitución. Así, para el de Gauss se tiene
(nótese que el orden de los factores es importante).
Igualmente puede definirse el gradiente de un vector a partir de la expresión
y obtener el teorema integral correspondiente
==Diadas aplicadas a la física} La introducción de las diadas no pasaría de se un simple juego matemático si no sirvieran para simplificar las leyes físicas. En la física aparecen frecuentemente tensores cartesianos, todos los cuales admiten la expresión diádica correspondiente. En algunos caso ésta es más simple que las expresiones matriciales correspondientes. Veamos tres ejemplos, uno de mecánica y dos de electromagnetismo.
===Tensor de inercia}
Cuando se estudia el sólido rígido, se introduce el tensor de inercia
 que, para un punto material, es una matriz con componentes
que, para un punto material, es una matriz con componentes
En forma diádica este tensor se escribe simplemente como
Usando la expresión diádica podemos obtener, por ejemplo, el valor del momento angular
Si lo que queremos es hallar el tensor de inercia de una distribución tendremos que
También podemos obtener el tensor de inercia para una partícula en coordenadas esféricas como
===Momento cuadrupolar} Cuando se hace el desarrollo multipolar para calcular el potencial eléctrico creado por una distribución de carga en puntos alejados de la misma se obtiene que
Los distintos coeficientes son los llamados momentos multipolares. el primero, la carga, es un escalar. El segundo, el momento dipolar, es un vector. El tercero, el momento cuadrupolar, es un tensor. Para una carga puntual la expresión de este tensor es una matriz de componentes
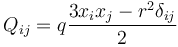
y expresiones integrales análogas para una distribución. En forma diádica, el momento cuadrupolar se escribe
Si tenemos, por ejemplo, una carga puntual situada en  tendremos
que su momento cuadrupolar respecto al origen es
tendremos
que su momento cuadrupolar respecto al origen es

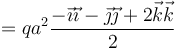
los que nos da, directamente, las nueve componentes de la matriz correspondiente
Si ahora pretendemos calcular la contribución cuadrupolar al potencial resultará
===Tensor de tensiones de Maxwell} En situaciones electrostáticas, es posible calcular la fuerza sobre un sistema directamente a partir del campo (sin conocer la densidad de carga que sufre la fuerza). Esto se consigue mediante el tensor de tensiones de Maxwell}, en la forma
esto es, la fuerza equivale al flujo sobre una superficie cerrada, que envuelva al sistema en cuestión, del citado tensor, cuya expresión diádica es
Esta expresión es válida en el vacío. En un dieléctrico lineal esta expresión se convierte en
La expresión matricial correspondiente, mucho más complicada, es
Si además de campos eléctricos tenemos campos magnéticos presentes la expresión del tensor de tensiones de Maxwell para el vacío es
==\ldots y más allá} Hasta aquí hemos hablado de las diadas como un producto entre dos vectores y lo hemos aplicado al estudio de los tensores cartesianos de segundo orden exclusivamente. Sin embargo, todo lo dicho no es más que un caso particular de un producto tensorial, extensible a cualquier orden y cualquier métrica. No existe problema en definir el producto diádico de tres vectores No se pudo entender (Falta el ejecutable de <strong>texvc</strong>. Por favor, lea <em>math/README</em> para configurarlo.): \vec{A}\vec{B}\bC
que sería un tensor de tercer orden, imposible de representar
por una matriz. También es posible tratar las diadas como un caso particular de aplicación lineal sobre los vectores. Cabe entonces hablar de diadas duales, de coordenadas covariantes y contravariantes, etc. Para todo ello existe bibliografía disponible.
==Problemas} \renewcommand{\theenumi}{\textbf{\arabic{enumi}}} \begin{enumerate} \item Hallar la expresión matricial de los siguientes productos diádicos. \begin{enumerate} \item

\item
\item
\end{enumerate} \item Es fácil ver que el conjunto de las diadas no forma un espacio vectorial, ya que la suma de dos diadas, No se pudo entender (Falta el ejecutable de <strong>texvc</strong>. Por favor, lea <em>math/README</em> para configurarlo.): \vec{A}\vec{B}+\bC\bD , no será, en general, otra diada. ¨Cuál es la condición o condiciones para que sí se de esta relación? \item ¨Cuáles son los autovalores de una diada, considerada como operador que actúa en el espacio de los vectores? ¨Y los autovectores correspondientes? En otras palabras, dada la relación
hallar los valores posibles de λ y  .
\item Repetir el problema anterior para el cálculo de los llamados
autovectores por la izquierda}, definidos como los
tales que
.
\item Repetir el problema anterior para el cálculo de los llamados
autovectores por la izquierda}, definidos como los
tales que
\item Se define la diada traspuesta} de una dada como
\begin{enumerate} \item Demostrar que toda diada puede ponerse como suma de un tensor simétrico (igual a su traspuesto) y de uno antisimétrico (igual a su traspuesto cambiado de signo)

Hallar  y
y  (sugerencia: hallar la
traspuesta de la expresión anterior).
\item En el cálculo anterior, ¨qué representan las componentes del
tensor antisimétrico ?
\item ¨Cuál es la condición para que una diada sea simétrica
(
(sugerencia: hallar la
traspuesta de la expresión anterior).
\item En el cálculo anterior, ¨qué representan las componentes del
tensor antisimétrico ?
\item ¨Cuál es la condición para que una diada sea simétrica
( )? ¨Y para que sea antisimétrica (
)? ¨Y para que sea antisimétrica ( )?
\item A partir de la base cartesiana de las diadas, hallar una base
del subespacio de tensores simétricos y del de tensores
antisimétricos.
\end{enumerate}
\item Demostrar que todo tensor se puede escribir como
)?
\item A partir de la base cartesiana de las diadas, hallar una base
del subespacio de tensores simétricos y del de tensores
antisimétricos.
\end{enumerate}
\item Demostrar que todo tensor se puede escribir como
¨Cuánto valen ,  y No se pudo entender (Falta el ejecutable de <strong>texvc</strong>. Por favor, lea <em>math/README</em> para configurarlo.): \bC
? Esto permite considerar los
tensores como vectores de vectores y muestra que todo tensor puede
ponerse como combinación de sólo tres diadas.
\item Expresar el tensor No se pudo entender (Falta el ejecutable de <strong>texvc</strong>. Por favor, lea <em>math/README</em> para configurarlo.): \br\vec{r}-r^2\mathcal{I}
y No se pudo entender (Falta el ejecutable de <strong>texvc</strong>. Por favor, lea <em>math/README</em> para configurarlo.): \bC
? Esto permite considerar los
tensores como vectores de vectores y muestra que todo tensor puede
ponerse como combinación de sólo tres diadas.
\item Expresar el tensor No se pudo entender (Falta el ejecutable de <strong>texvc</strong>. Por favor, lea <em>math/README</em> para configurarlo.): \br\vec{r}-r^2\mathcal{I}
en coordenadas
cilíndricas.
\item Hallar las componentes cartesianas del tensor
 .
\item Obtener las componentes del gradiente de un vector en
coordenadas cilíndricas. Recuérdese que
.
\item Obtener las componentes del gradiente de un vector en
coordenadas cilíndricas. Recuérdese que
y todas las demas derivadas son nulas.
\item Hallar la divergencia y el rotacional del tensor No se pudo entender (Falta el ejecutable de <strong>texvc</strong>. Por favor, lea <em>math/README</em> para configurarlo.): \vec{A}\br
, con
un vector constante.
\item Hallar el gradiente del campo vectorial No se pudo entender (Falta el ejecutable de <strong>texvc</strong>. Por favor, lea <em>math/README</em> para configurarlo.): \vec{A}=r^n\bu{r}
y del
No se pudo entender (Falta el ejecutable de <strong>texvc</strong>. Por favor, lea <em>math/README</em> para configurarlo.): \vec{B}=\rho^n\bu{\rho} . \item Demostrar que si un tensor es el gradiente de un vector, su rotacional es nulo. \item Hallar el tensor de inercia de una varilla homogénea de longitud L, colocada a lo largo del eje z y con centro en el origen de coordenadas. \item Hallar el momento cuadrupolar de un anillo de radio R con densidad de carga λ situado en el plano xy con centro el origen de coordenadas. \item Determinar, empleando el tensor de tensiones de Maxwell, que una carga puntual no ejerce fuerza sobre sí misma. \end{enumerate} \end{document}

