Movimiento instantáneo de triángulo rígido con vértices en planos ortogonales, F1 GIA (Ene, 2018)
De Laplace
Contenido |
1 Enunciado


En un determinado instante en que los vértices del triángulo ocupan los puntos de coordenadas conocidas  y
y  , se comprueba que las velocidades de B y C son idénticas (
, se comprueba que las velocidades de B y C son idénticas ( ), siendo v0 el módulo de ambas.
), siendo v0 el módulo de ambas.
- Determine las componentes de la velocidad del vértice A en dicho instante.
- También en el instante considerado, ¿qué dirección debe tener el vector rotación
 , característico del movimiento del sólido? Justifique su respuesta y obtenga la expresión analítica (componentes) de dicho vector.
, característico del movimiento del sólido? Justifique su respuesta y obtenga la expresión analítica (componentes) de dicho vector.
2 Solución
La condición geométrica de rigidez, característica del modelo de sólido rígido para los cuerpos materiales, se traduce en la condición cinemática de rigidez para el campo de velocidades que a cada punto del sólido le hace corresponder un vector que describe la velocidad instantánea de dicho punto, cuando el sólido se encuentra en movimiento respecto de un determinado sistema de referencia fijo, OXYZ:

Esta condición establece que dicho campo de velocidades es equiproyectivo: las velocidades instantáneas de cualquier par de puntos de un solido rígido  en movimiento tienen proyecciones idénticas sobre la recta que pasa por dichos puntos. Esto puede expresarse matemáticamente de la siguiente forma:
en movimiento tienen proyecciones idénticas sobre la recta que pasa por dichos puntos. Esto puede expresarse matemáticamente de la siguiente forma:

en cada instante de tiempo.
2.1 Velocidades de los vértices del triángulo en un instante
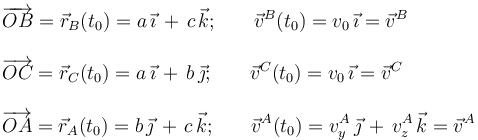
En el sistema bajo estudio, los vértices A, B y C de un sólido rígido triangular se mueven deslizando por tres planos ortogonales que tomaremos como los respectivos planos cartesianos. Por tanto, se tendrá que, en general:



Por tanto, en el instante considerado, se tendrá...
Para determinar las compenentes desconocidas de la velocidad del vértice A exigimos la equiproyectividad de las velocidades instantáneas de los tres vértices:

De la primera condición se obtiene...

... y de la segunda...

Por tanto, la velocidad del vértice A en el instante t0 es:

2.2 Vector rotación instantánea
Como sabemos, el teorema de Chasles establece que dado un sólido rígido en movimiento, en cada instante de tiempo existe un único vector  para todo el campo de velocidades, denominado vector rotación instantánea, que relaciona las velocidades instantáneas en cualquier par de puntos:
para todo el campo de velocidades, denominado vector rotación instantánea, que relaciona las velocidades instantáneas en cualquier par de puntos:

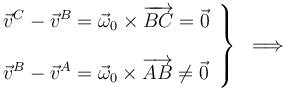
En el sistema bajo estudio y en el instante considerado, existirá un vector  que relaciona las velocidades instantáneas de los puntos del triángulo rígido y, en particular, de sus vértices. Si tenemos en cuenta que las velocidades de los vértices B y C se igualan en el instante t0 y que la del vértice A es distintas, podemos asegurar que el vector rotación instantánea es no nulo y su dirección es la del segmento
que relaciona las velocidades instantáneas de los puntos del triángulo rígido y, en particular, de sus vértices. Si tenemos en cuenta que las velocidades de los vértices B y C se igualan en el instante t0 y que la del vértice A es distintas, podemos asegurar que el vector rotación instantánea es no nulo y su dirección es la del segmento  :
:


Por tanto, la expresión analítica cartesiana del vector rotación en en instante t0 sólo debe tener componentes en las direcciones de los unitarios  y
y  , y éstas deben tener distinto signo:
, y éstas deben tener distinto signo:

Para determinar su valor utilizamos, por ejemplo, la segunda de las anteriores relaciones vectoriales:

... obteniéndose: