



4.3. Velocidad de tres puntos de un sólido
De Laplace
Contenido |
1 Enunciado
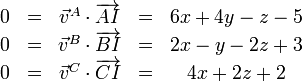
Los vectores de posición y las velocidades de tres puntos de un sólido son, en el SI,
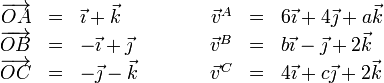
- Halle los valores de a, b, c.
- Halle la velocidad del punto
 .
.
- Calcule la velocidad angular y la de deslizamiento
- Determine la posición del eje instantáneo de rotación.
Todas las cantidades están expresadas en las unidades del SI.
2 Valores de las constantes
Podemos hallar las constantes indeterminadas imponiendo la condición cinemática de rigidez, esto es, la equiproyectividad del campo de velocidades:

En este caso tenemos, para los puntos A y B

Proyectando e igualando




Repitiendo para A y C




y para B y C




Tenemos el sistema de tres ecuaciones con tres incógnitas
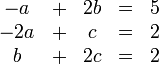
con solución

Las posiciones y velocidades completas de los tres puntos son entonces
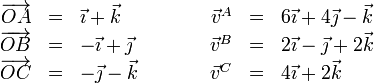
Vemos que, aunque para conocer el estado de movimiento de un sólido necesitamos las velocidades de tres de sus puntos, que en total tienen 9 componentes, solo 6 de esas componentes son necesarias, resultando las otras 3 de la condición de rigidez, como corresponde a que un sólido rígido tenga 6 grados de libertad.
3 Velocidad en P
A partir de la velocidad de tres puntos no colineales podemos determinar la velocidad angular y la de deslizamiento del sólido, y a partir de ahí la velocidad de cualquier otro punto. No obstante, también podemos hallar la velocidad de un punto P, no coplanario con A, B y C, a partir de la condición de rigidez. Aplicándola al par formado por P y cada uno de los tres puntos conocidos, tenemos



Imponiendo ahora la equiproyectividad

con solución
4 Velocidad angular y de deslizamiento
4.1 Velocidad angular
Existen varias formas de determinar la velocidad angular del sólido.
Una de ellas consiste en observar que


Esto quiere decir que  es ortogonal a las dos diferencias de velocidades y por tanto va en la dirección de su producto vectorial, esto es,
es ortogonal a las dos diferencias de velocidades y por tanto va en la dirección de su producto vectorial, esto es,

Sustituyendo
El valor de λ lo obtenemos sustituyendo en alguna de las ecuaciones anteriores

de donde

4.2 Velocidad de deslizamiento
Una vez que tenemos la velocidad angular, podemos hallar la velocidad de deslizamiento a partir de la velocidad de cualquier punto del sólido
Esto quiere decir que la velocidad de deslizamiento es nula y por tanto el movimiento instantáneo del sólido es de rotación.
5 EIR
La posición del eje instantáneo de rotación la obtenemos mediante la formula


Esta ecuación queda un poco más corta haciendo
y nos queda

Otra posibilidad consiste en buscar aquellos puntos cuya velocidad es nula (por tratarse de una rotación). Esto nos da
La solución de estas ecuaciones conduce a unas ecuaciones paramétricas equivalentes a la ecuación vectorial anterior.

