



Movimiento circular en 3D
De Laplace
Contenido |
1 Enunciado
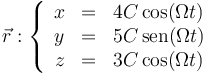
Una partícula se mueve según las ecuaciones horarias

con C y Ω constantes.
- ¿Qué trayectoria sigue la partícula?
- ¿Qué desplazamiento realiza y qué distancia recorre la partícula entre t=0 y t = π/Ω?
- ¿Qué tipo de movimiento describe la partícula?
2 Trayectoria
Podemos identificar la trayectoria a partir de razonamientos puramente geométricos o empleando procedimientos cinemáticos.
2.1 Identificación geométrica
Si separamos las tres componentes del movimiento
De aquí es evidente que

Esta es la ecuación de un plano. También la podemos escribir en forma vectorial como

El vector  es un vector constante ortogonal al plano de movimiento.
es un vector constante ortogonal al plano de movimiento.
Además tenemos que se cumple

y sumando estas dos

que es la ecuación de una esfera de radio R = 5C.
la trayectoria es entonces la intersección de un plano y una esfera. Esa intersección es siempre una circunferencia. Por tanto el movimiento es circular.

2.2 Procedimiento cinemático
El método anterior es muy simple para determinar que el movimiento es plano, pero no siempre se encuentra a la primera qué combinación lineal de las variables nos da la ecuación del plano, si este existe.
Por ello, existen procedimiento sistemáticos para determinar esta situación.
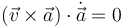
Uno es el siguiente: hay que hallar la velocidad, la aceleración y la derivada de ésta respecto al tiempo. El movimiento es plano si y solo si se cumple la condición
En nuestro caso tenemos

El producto vectorial de la velocidad y la aceleración lo da el el determinante

Siendo el producto mixto de los tres vectores

Podemos ver que este determinante se anula sin necesidad de desarrollarlo porque la tercera fila es igual a la primera multiplicada por − Ω2, o la tercera columna igual a la primera multiplicada por 3/4.
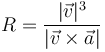
Con eso ya tenemos que la trayectoria es plana. Para ver que además es circular vamos a calcular el radio de curvatura, según la fórmula
La rapidez del movimiento vale

Esta cantidad es constante por lo que ya sabemos además que el movimiento es uniforme.

