No Boletín - Identificación de movimiento (Ex.Nov/10)
De Laplace
Contenido |
1 Enunciado
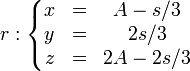
Una partícula se mueve según las ecuaciones horarias

- ¿Qué trayectoria sigue la partícula?
- Determine la ley horaria s(t). Suponga que s(0) = 0.
- ¿Qué tipo de movimiento describe la partícula?
2 Trayectoria
2.1 Método 1: Ecuaciones implícitas
La forma más directa de identificar la trayectoria consiste en buscar ecuaciones implícitas

que sean satisfechas por la posición instantánea en todo momento.
Separando en componentes tenemos que



De aquí es inmediato que



que es la ecuación de un plano, por lo que, por lo pronto, la trayectoria es plana.
Además, se verifica

con lo que la trayectoria está también contenida en el plano

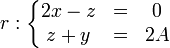
Al estar la trayectoria contenida en la intersección de dos planos, llegamos a la conclusión de que el movimiento es rectilíneo, siendo su trayectoria la recta
2.2 Método 2: Vector tangente
Un procedimiento sistemático para determinar un movimiento es rectilíneo consiste en determinar el vector tangente a la trayectoria y ver si éste es constante.
Hallamos este vector tangente calculando previamente la velocidad

y dividiendo por su módulo, la celeridad,

lo que nos da el vector tangente
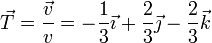
Este vector es constante y por tanto el movimiento es rectilíneo. La ecuación de la recta la obtenemos a partir se la posición inicial y empleando este vector tangente como vector director

o, separando en componentes