



Mono intentado alcanzar unos plátanos
De Laplace
Contenido |
1 Enunciado

Un mono de masa m0 cuelga de una cuerda ideal inextensible y sin masa, que está enrollada en una polea de radio R. En el otro extremo de la cuerda hay un racimo de plátanos que tienen la misma masa m0 del mono. Los plátanos están por encima del mono, como se indica en la figura. Éste los ve y comienza a trepar por la cuerda para intentar alcanzarlos.
- Supongamos que la masa de la polea es despreciable. ¿Consigue el mono atrapar los platanos antes de que estos alcancen la altura de la polea?
- Supongamos ahora que la polea es un aro con masa M. En el instante inicial los plátanos están a una distancia L de la altura de la polea y el mono a una distancia 2L. El mono sube la cuerda con velocidad v0 respecto a la polea. ¿Que condición debe cumplir M para que el mono pueda alcanzar los plátanos antes de que estos lleguen a la polea?
2 Solución
2.1 Polea sin masa

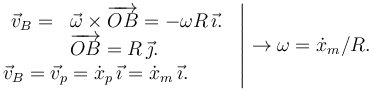
Consideramos que el mono y el racimo de plátanos forman un sistema de dos partículas. El sistema se puede modelar con la figura de la derecha, con las masas m (el mono) y p (los plátanos), ambos de la misma magnitud $m_0$. El momento angular de este sistema respecto al centro de la polea es

El momento angular del mono es
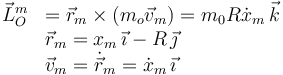
El momento angular del racimo de plátanos es
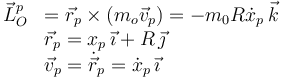
Por tanto, el momento angular total es

Como se observa en el dibujo, las únicas fuerzas externas que actúan sobre el sistema de dos partículas son sus pesos.

Las fuerzas que ejerce la cuerda no cuentan en la evolución del momento angular total pues son fuerzas internas. Aplicando el T.M.C. en el punto O tenemos
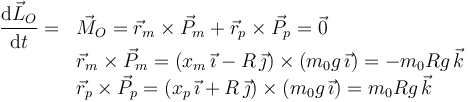
Es decir,  es constante durante todo el proceso. Pero en el instante inicial era nulo, pues tanto el mono como los plátanos estaban en reposo. Entonces es nulo en todo instante y por tanto
es constante durante todo el proceso. Pero en el instante inicial era nulo, pues tanto el mono como los plátanos estaban en reposo. Entonces es nulo en todo instante y por tanto

El mono y los plátanos suben con la misma velocidad. Por tanto el mono no alcanza los plátanos antes de que éstos lleguen a la polea.
2.2 Polea con masa

Ahora tenemos que considerar un sistema formado por el mono, los plátanos y el aro. El momento angular total en O es

Las expresiones para los momentos del mono y los plátanos son iguales que antes. Para el aro tenemos
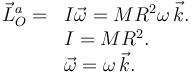
Aquí, I es el momento de inercia del aro respecto a un eje perpendicular a él que pasa por su centro. El vector  describe la rotación de la polea. Como se ve en el dibujo, El punto A de la cuerda tiene la misma velocidad que el mono. Pero el punto A de la polea también tiene la misma velocidad. Entonces tenemos
describe la rotación de la polea. Como se ve en el dibujo, El punto A de la cuerda tiene la misma velocidad que el mono. Pero el punto A de la polea también tiene la misma velocidad. Entonces tenemos
Con esto, el momento angular total respecto al punto O es

La figura muestra las dos fuerzas exteriores que hay que añadir cuando la polea tiene masa: su peso  y la fuerza vincular
y la fuerza vincular  que ejerce el eje sobre el aro para que no se caiga.
que ejerce el eje sobre el aro para que no se caiga.
Ahora bien, estas dos fuerzas se aplican en el punto O, por lo que no contribuyen al momento total de fuerzas externas respecto a O. Por tanto, se cumple otra vez

Y, entonces

El enunciado dice que, en este caso,  (la coordenada xm se hace mas pequeña). Entonces
(la coordenada xm se hace mas pequeña). Entonces

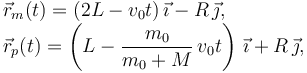
Tanto el mono como los plátanos realizan movimientos rectilíneos uniformes. El enunciado nos dice que las condiciones iniciales son

Utilizando las expresiones del movimiento rectilíneo uniforme tenemos
Cuando los plátanos y el mono están a la misma altura las componentes en X deben ser iguales. Así averiguamos el instante t0 para el que ocurre

Para que el mono alcance los plátanos antes de que estos lleguen a la polea el valor de xm en el instante t0 debe ser mayor que cero

Es decir, para que el mono alcance los plátanos la masa de la polea debe ser mayor que la del mono. Si son iguales el mono y los plátanos llegan a la altura del centro del aro a la vez.

